|
|
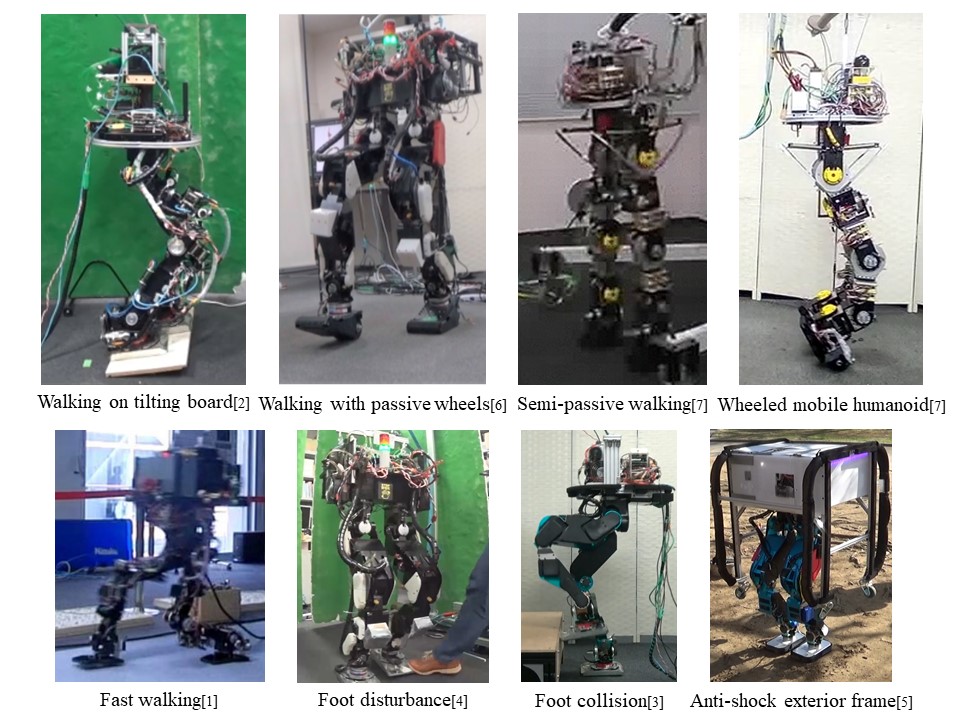
Biped Robot Platform
- Papers
-
Junichi Urata, Koichi Nshiwaki, Yuto Nakanishi, Kei Okada, Satoshi Kagami, Masayuki Inaba:
Online decision of foot placement using singular LQ preview regulation,
in Proceedings of the 2011 IEEE-RAS International Conference on Humanoid Robots (Humanoids), pp.13--18, 2011.
-
Hiroto Suzuki, Yuya Nagamatsu, Takuma Shirai, Shunichi Nozawa, Yohei Kakiuchi, Kei Okada, Masayuki Inaba:
Torque based stabilization control for torque sensorless humanoid robots,
in Proceedings of the 2017 IEEE-RAS International Conference on Humanoid Robots (Humanoids), pp.425--431, 2017.
-
Tatsuya Ishikawa, Yuta Kojio, Kunio Kojima, Shunichi Nozawa, Yohei Kakiuchi, Kei Okada, Masayuki Inaba:
Bipedal walking control against swing foot collision using swing foot trajectory regeneration and impact mitigation,
in Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp.4531--4537, 2017.
-
Takuma Shirai, Yuya Nagamatsu, Hiroto Suzuki, Shunichi Nozawa, Kei Okada, Masayuki Inaba:
Design and evaluation of torque based bipedal walking control system that prevent fall over by impulsive disturbance,
in Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp.739--746, 2018.
-
Yuta Kojio, Yasuhiro Ishiguro, Fumihito Sugai, Yohei Kakiuchi, Kei Okada, Masayuki Inaba:
Unified balance control for biped robots including modification of footsteps with angular momentum and falling detection based on capturability,
in Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp.497--504, 2019.
-
Kohei Kimura, Noriaki Imaoka, Shintaro Noda, Yohei Kakiuchi, Kei Okada, Masayuki Inaba:
Locomotion approach of bipedal robot utilizing passive wheel without swing leg based on stability margin maximization and fall prevention functions,
ROBOMECH Journal, Vol. 7, No. 1, pp.1--19, 2020.
-
Shintaro Noda, Fumihito Sugai, Kunio Kojima, Kim-Ngoc-Khanh Nguyen, Yohei Kakiuchi, Kei Okada, Masayuki Inaba:
Semi-Passive Walk and Active Walk by One Bipedal Robot: Mechanism, Control and Parameter Identification,
International Journal of Humanoid Robotics, Vol. 17, No. 2, 2050012, 2020.
|
|
|