
IRTロボットシステム研究開発
東京大学では「少子高齢社会と人を支えるIRT基盤創出の研究」プロジェクト を2006年より行っている.このプロジェクトでは,IRTイノベーションを進め てゆくプラットフォームを定め,少子高齢社会と人を支えるIRT基盤を創出す るというシナリオを描いている.そのプラットフォームは, ヒューマノイド,社会・生活支援システム,パーソナルモビリティである. IRT基盤創出プロジェクトにおけるロボットシステム研究では,これらのプラッ トフォームを構成し,少子高齢社会のニーズに向けて,ロボットデバイス, IRT制御,IRT環境,サイバーインタフェースの新しい技術をプラットフォーム で実践しつつIRTイノベーションを目指している. JSKでは,IRT研究機構IRTシステム研究部門の ロボットシステム研究開発グループを担当している.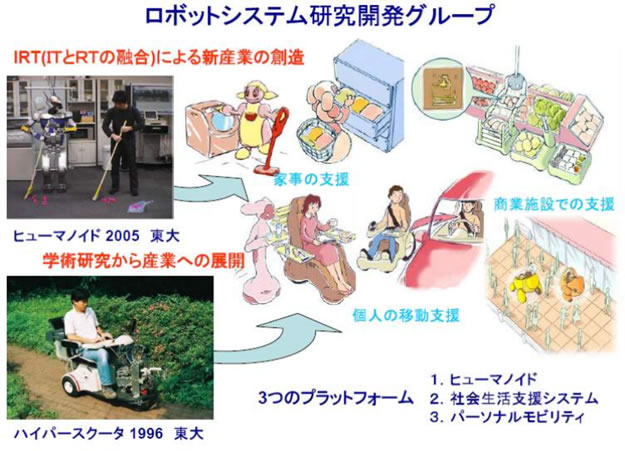
研究目標
ハードに応じた制御プログラムの自動生成や,高度なマルチエージェントシステムを実現するための高機能な統合ソフトウェア基盤を開発するとともに,観察と学習によって状況を認識し,さらには人の意図も理解できる,安全で人と環境にやさしい自律ヒューマノイドやパーソナルモビリティの実現を目指す.
- 参考文献
- M. Inaba, K. Okada, T. Yoshikai, R. Hanai, K. Yamazaki, Y. Nakanish, H. Yaguchi, N. Hatao, J. Fujimoto, M. Kojima, S. Tokutsu, K. Yamamoto, Y. Kakiuchi, T. Maki, S. Nozawa, R. Ueda, I. Mizuuchi: Enhanced Mother Environment with Humanoid Specialization in IRT Robot Systems, in Cedric Pradalier and Roland Siegwart and Gerhard Hirzinger (Eds.): Robotics Research: The 14th International Symposium ISRR, pp.379--396, Springer, 2011.
- Kei Okada, Mitsuharu Kojima, Satoru Tokutsu, Yuto Mori, Toshiaki Maki, Masayuki Inaba: Integrating Recognition and Action Through Task-Relevant Knowledge for Daily Assistive Humanoids, Advanced Robotics, Vol.23, No.4, pp.459--480, 2009.
- 稲葉 雅幸: 東大IRT拠点におけるロボットシステム研究, in 第25回日本ロボット学会学術講演会講演論文集, 1L36, 2007.
- 稲葉 雅幸: IRT基盤創出プロジェクトにおけるロボットシステム研究, in 第24回ロボット学会学術講演会予稿集, 2M13, 2006.
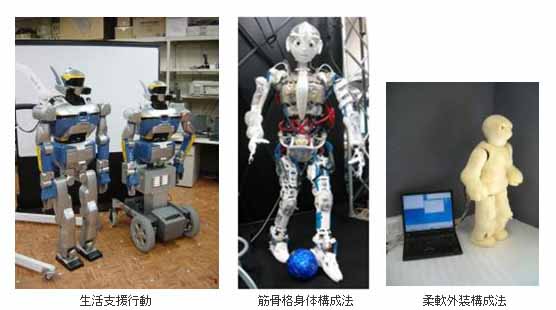
ヒューマノイド
- 人が活動し,人のために作られた環境で,人が行っていることを理解し,人の能力を規範とし,人の活動を支援する人型ロボットプラットフォーム.
- 歩行技術,安定化技術,視聴覚認識機能,双腕協調操作,道具操作,全身行動操作,転倒復帰行動,全身分布感覚系,筋骨格腱駆動,全身ダイナミック動作スキル技術.
パーソナルモビリティ

- 人が乗り込んで屋内屋外をシームレスに移動でき,個人のモビリティを広く豊かにする移動型ロボットプラットフォームである.
- 高操作性移動制御,障害物検出,自律移動技術,対人対話機能,危険回避緊急制動,環境認識,ビューシーケンス,自己位置認識技術.
認識・学習・行動融合技術
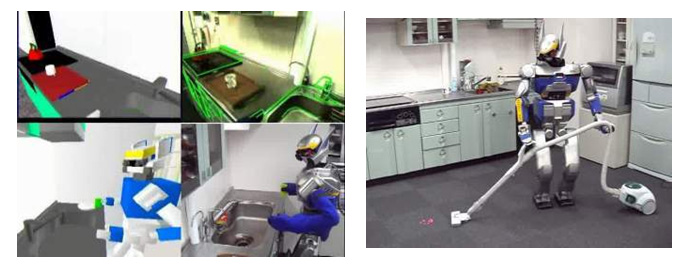
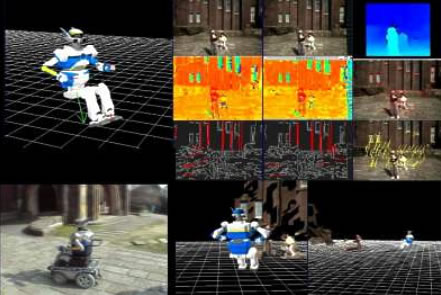
水周りで働く生活支援ロボット技術(左図) 人が使う道具の操作(右図)
- 認識と行動の機能を統合し,行動結果の判断と人との対話を通した学習能力を統合する技術.
- 実時間視覚追跡,視聴覚処理,空間記憶情報処理,注視点制御,統計的パタン認識,空間プランニング,SLAM技術,記憶利用型情報処理,ベイジアンネット,強化学習,確率的推論機能.
人と環境への適応技術

人の実演から学ぶ知能化技術
- 観察と学習によって状況を認識し,人の意図を理解しつつ,ロボットの認識行動を人と実環境へ適応させる技術.
- 人の振る舞いの視覚認識技術と意図推定,模倣機能,人との対話技術,環境音認識,柔軟触覚皮膚,触覚利用動作技術,自律操縦機能の統合技術,時系列情報処理技術,確率的統計情報処理技術.
IRT基盤ソフトウェア
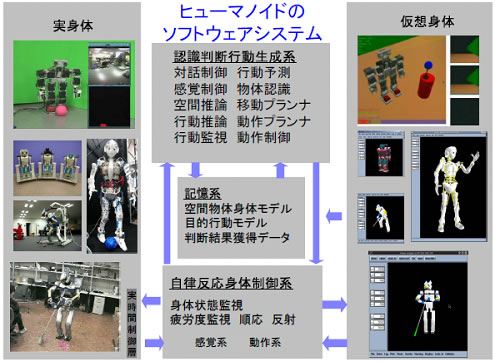
実身体・仮想身体 統合ソフトウェアシステム
ロボットボディ・ブレインのマザー環境
- 大規模ネットワーク技術,小型高性能計算機システム,ソフトウェア技術を,実世界と相互作用するロボット技術と結ぶロボットシステムにおける基盤ソフトウェア技術.
- 人工知能研究用並列オブジェクト指向プログラミング言語,組込み幾何モデリングシステム,実時間メモリ管理機能,ネットワーク分散プログラミング,組込みリアルタイム処理,イベント処理システム,オンラインデバッグ技術,制御プログラム生成技術
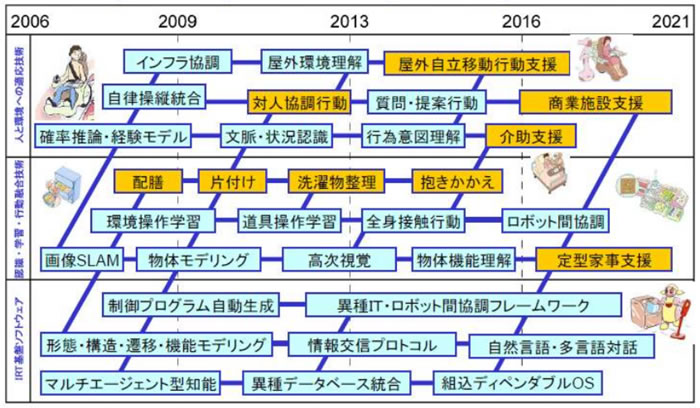
ロードマップ
 までお願いします.
までお願いします.