|
|
腱志郎
- Papers
- Yuki Asano, Hironori Mizoguchi, Toyotaka Kozuki, Yotaro
Motegi, Junichi Urata, Yuto Nakanishi, Kei Okada, Masayuki
Inaba: Achievement of Twist Squat by Musculoskeletal Humanoid
with Screw-Home Mechanism, in Proceedings of The 201 IEEE/RSJ
International Conference on Intelligent Robots and Systems,
pp.4649-4654, 2013.
- Yuki Asano, Takuma Shirai, Toyotaka Kozuki, Yotaro Motegi,
Yuto Nakanishi, Kei Okada, Masayuki Inaba: Motion Generation of
Redundant Musculoskeletal Humanoid Based on Robot-Model Error
Compensation by Muscle Load Sharing and Interactive Control
Device, in Proceedings of the 2013 IEEE-RAS International
Conference on Humanoid Robots (Humanoids 2013), pp.336-341,
2013.
-
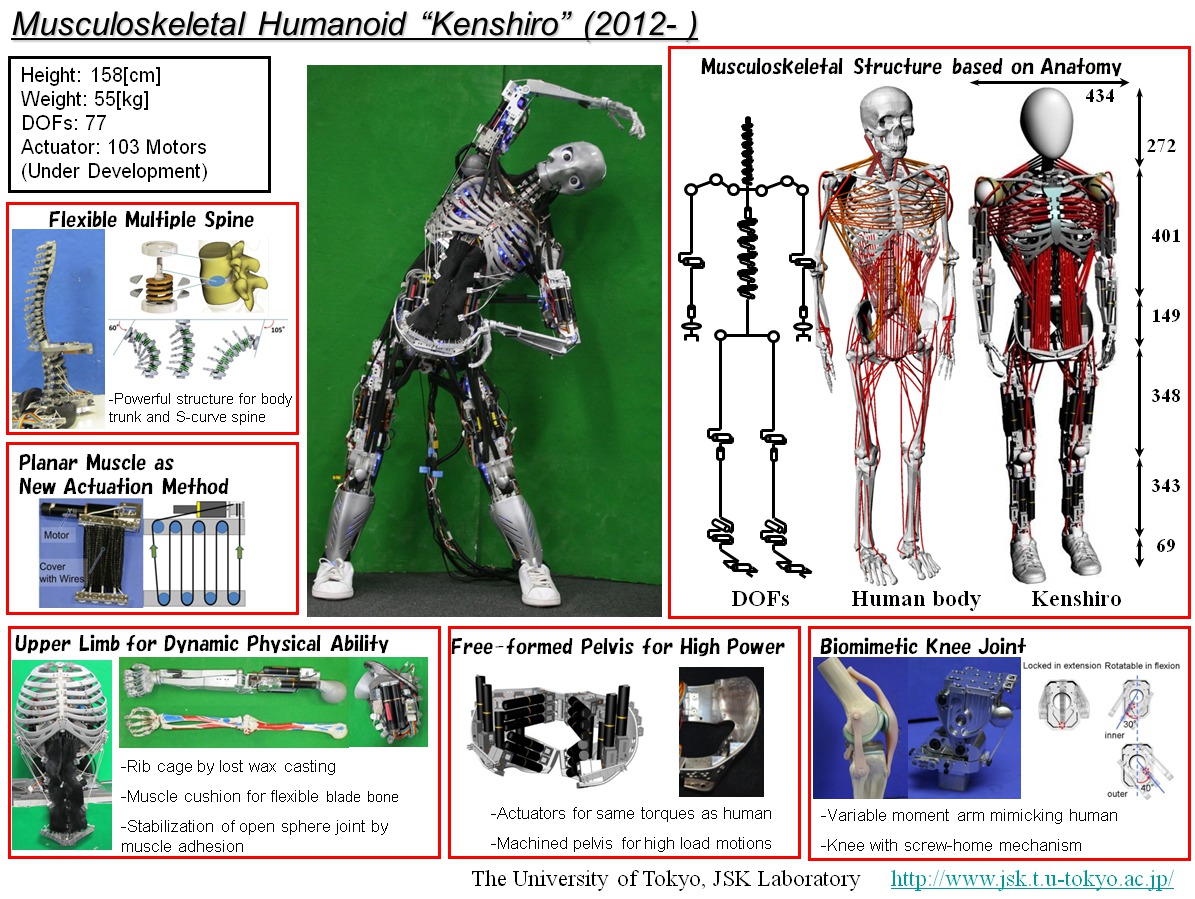
Yuto Nakanishi, Yuki Asano, Toyotaka Kozuki, Hironori Mizoguchi,
Yotaro Motegi, Masahiko Osada, Takuma Shirai, Junichi Urata, Kei
Okada, Masayuki Inaba: Design Concept of Detail Musculoskeletal
Humanoid "Kenshiro" -Toward a real human body musculoskeletal
simulator-, in Proceedings of the 2012 IEEE-RAS International
Conference on Humanoid Robots (Humanoids 2012), pp.1-6, 2012.
- 中西 雄飛, 長田 将彦, 上月 豊隆, 溝口 弘悟, 浅野 悠紀, 白井 拓磨,
浦田 順一, 稲葉 雅幸: 人体模倣筋骨格ヒューマノイド腱志郎の全身設計,
日本機械学会ロボティクス・メカトロニクス講演会'12 講演論文集,
1A1-K07, 2012.
- Yuki Asano, Hironori Mizoguchi, Toyotaka Kozuki Yotaro Motegi,
Masahiko Osada, Junichi Urata, Yuto Nakanishi, Kei Okada, Masayuki
Inaba:�Lower Thigh Design of Detailed Musculoskeletal Humanoid
``Kenshiro'', Proceedings of The 2012 IEEE/RSJ International
Conference on Intelligent Robots and Systems, pp.4367-4372, 2012.
- Toyotaka Kozuki, Hironori Mizoguchi, Yuki Asano, Masahiko Osada,
Takuma Shirai, Junichi Urata, Yuto Nakanishi, Kei Okada, Masayuki
Inaba: Design Methodology for Thorax and Shoulder of Human Mimetic
Musculoskeletal Humanoid Kenshiro -A Thorax with Rib like
Surface-, Proceedings of The 2012 IEEE/RSJ International
Conference on Intelligent Robots and Systems, pp.4367-4372, 2012.
- 溝口弘悟, 浅野悠紀, 上月豊隆, 茂木陽太郎, 浦田順一, 中西雄飛, 岡田
慧, 稲葉雅幸: 人体詳細等身大腱駆動ヒューマノイド『腱志郎』による対話
的フィードバックに基づく動作生成戦略, 第30回日本ロボット学会学術講
演会講演論文集, 2C3-6, 2012.
- 白井 拓磨, 上月 豊隆, 溝口 弘悟, 浅野 悠紀 長田 将彦, 中西 雄飛,
岡田 慧, 稲葉 雅幸: 人体模倣筋骨格ヒューマノイド「腱志郎」の運動制御-
人体の関節構造を模した面状筋機構を有する腱駆動ロボットでの動作教示の
ためのシステム構成-, 日本機械学会ロボティクス・メカトロニクス講演会'
12 講演論文集, 1A1-K10, 2012.
- 溝口 弘悟, 浅野 悠紀, 上月 豊隆, 長田 将彦, 浦田 順一, 中西 雄飛,
岡田 慧, 稲葉 雅幸: 体模倣筋骨格ヒューマノイド「腱志郎」の骨盤設計 -
人体の冗長筋骨格系を模した高密度高出力筋群を備えた金属性強化骨盤・大
腿骨の開発 -, 日本機械学会ロボティクス・メカトロニクス講演会'12 講演
論文集, 1A1-K09, 2012.
- 浅野 悠紀, 溝口 弘悟, 上月 豊隆, 長田 将彦, 浦田 順一, 中西 雄飛,
岡田 慧, 稲葉 雅幸: 人体模倣筋骨格ヒューマノイド「腱志郎」の下腿設計,
日本機械学会ロボティクス・メカトロニクス講演会'12 講演論文集,
1A1-K08, 2012.
- Masahiko Osada, Hironori Mizoguchi, Yuki Asano, Toyotaka
Kozuki, Junichi Urata, Yuto Nakanishi, Kei Okada, Masayuki Inaba:
Design of Humanoid Body Trunk with“Multiple Spine Structure” and
“Planar-muscle-driven” System for Achievement of Humanlike
Powerful and Lithe Motion, Proceedings of the 2011 IEEE
International Conference on Robotics and Biomimetics, pp.2217--2222,
2011.
- Yuki Asano, Hironori Mizoguchi, Masahiko Osada, Toyotaka
Kozuki, Junichi Urata, Tamon Izawa, Yuto Nakanishi, Kei Okada,
Masayuki Inaba: Biomimetic Design of Musculoskeletal Humanoid Knee
Joint with Patella and Screw-Home Mechanism, Proceedings of the
2011 IEEE International Conference on Robotics and Biomimetics,
pp.1813--1818, 2011.
- Takuma Shirai, Junichi Urata, Yuto Nakanishi, Kei Okada,
Masayuki Inaba: Whole Body Adapting Behavior with Muscle Level
Stiffness Control of Tendon-Driven Multijoint Robot, Proceedings
of the 2011 IEEE International Conference on Robotics and
Biomimetics, pp.2229--2234, 2011.
- Hironori Mizoguchi, Yuki Asano, Tamon Izawa, Masahiko Osada,
Junichi Urata, Yuto Nakanishi, Kei Okada, Masayuki Inaba:Biomimetic
Design and Implementation of Muscle Arrangement around Hip Joint for
Musculoskeletal Humanoid, Proceedings of the 2011 IEEE
International Conference on Robotics and Biomimetics, pp.1819--1824,
2011.
- 浅野悠紀, 溝口弘悟, 浦田順一, 伊沢多聞, 中西雄飛, 岡田慧, 稲葉
雅幸: 膝蓋骨を有する腱駆動ヒューマノイドの膝関節の開発, 第29回日
本ロボット学会学術講演会講演論文集, 2P1-4, 2011.
- 溝口弘悟, 浅野悠紀, 伊沢多聞, 長田将彦, 浦田順一, 中西雄飛, 岡
田慧, 稲葉雅幸: 筋骨格等身大ヒューマノイドの骨盤冗長筋配置における設
計法と評価, 第29回日本ロボット学会学術講演会講演論文集, 1J2-7, 2011.
- 長田将彦, 梯 百合子, 浦田順一, 中西雄飛, 岡田慧, 稲葉雅幸: 人間
の力強くしなやかな動作を実現する面状筋駆動多節脊椎の開発, 第29回日本
ロボット学会学術講演会講演論文集, 2P1-3, 2011.
|
|
|

 までお願いします.
までお願いします.