|
|
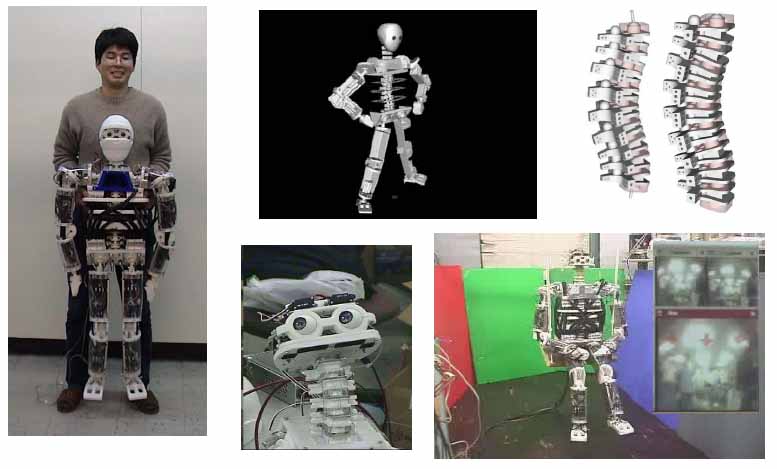
Kenta: a whole-body tendon-driven humanoid with flexible spine
- Points
- Whole-body motions using the flexible spine
- Human-like natural motion
- How to build and control a complexed-structure
many-DOF robot
- Reference
- Ikuo Mizuuchi, Tomoaki Yoshikai, Shigenori Yoshida, Yuto Nakanishi, Noritaka Ohtake, Masayuki Inaba, and Hirochika Inoue:
``Study on Information System for Robots of Complex Body Structure``,
The 21st Annual Conference of The Robotics Society of Japan, 3H33, 2003
- Ikuo Mizuuchi, Hironori Waita, Yuto Nakanishi, Tomoaki Yoshikai, Masayuki Inaba, and Hirochika Inoue:
``A Musculo-Skeletal Robot Leg Capable of Adding or Rearrainging the Muscles'',
The 21st Annual Conference of The Robotics Society of Japan, 1C29, 2003
- Ikuo Mizuuchi, Yuto Nakanishi, Tomoaki Yoshikai, Masayuki Inaba, and Hirochika Inoue:
``A Software System where Body Information of Redundant Musculo-Skeletal humanoid'',
The 21st Annual Conference of The Robotics Society of Japan, 1C2a, 2003
- Tomoaki Yoshikai, Ikuo Mizuuchi, Masayuki Inaba, and Hirochika Inoue:
``Acquisition of an imitation behavior in Kenta with R-learning algorithm'',
The 21st Annual Conference of The Robotics Society of Japan, 2A28, 2003
- Ikuo Mizuuchi, Tomoaki Yoshikai, Daisuke Sato, Shigenori Yoshida, Masayuki Inaba, and Hirochika Inoue:
``Behavior Developing Environment for the Large-DOF Muscle-driven Humanoid Equipped with Numerous Sensors'',
In Proceedings of the 2003 IEEE International Conference on Robotics and Automation, pp.1940--1945, 2003
- Tomoaki Yoshikai, Shigenori Yoshida, Ikuo Mizuuchi, Daisuke Sato, Masayuki Inaba, and Hirochika Inoue:
``Multi-sensor guided behaviors in whole body tendon-driven humanoid Kenta'',
Proceedings of the 2003 IEEE Conference on Multisensor Fusion and Integration for Intelligent Systems(MFI), pp.--, 2003
- Tomoaki Yoshikai, Ikuo Mizuuchi, Daisuke Sato, Shigenori Yoshida, Masayuki Inaba, and Hirochika Inoue:
"Behavior System Design and Implementation in Spined Musle-Tendon Humanoid 'Kenta'",
Journal of Robotics and Mechatronics, Vol.15, No.2, pp.143--152, 2003
- Tomoaki Yoshikai, Ikuo Mizuuchi, Masayuki Inaba, and Hirochika Inoue:
``Development and Implementation of the auditory information processing system for audition-based behavior in humanoid Kenta'',
2003 JSME Conference On Robotics And Mechatronics, 2A1-1F-E4, 2003
- Masayuki Inaba, Ikuo Mizuuchi, Ryosuke Tajima, Tomoaki Yoshikai, Daisuke Sato, Koichi Nagashima, and Hirochika Inoue:
``Building Spined Mustle-Tendon Humanoid'',
in Robotics Research: The Tenth International Symposium, Springer Verlag, pp.113--130, 2003
- Ikuo Mizuuchi, Tomoaki Yoshikai, Daisuke Sato, Shigenori Yoshida, Masayuki Inaba, and Hirochika Inoue:
"Swing Motion by a Spined Whole-Body Tendon-Driven Humanoid ``Kenta''",
Proceedings of the 20th Annual Conference of the Robotics Society of Japan, 1C38, 2002
- Tomoaki Yoshikai, Ikuo Mizuuchi, Daisuke Sato, Shigenori Yoshida, Masayuki Inaba, and Hirochika Inoue:
``Imitation behaviors of Kenta by behavioral integration with reflexes'',
Proceedings of the 20th Annual Conference of the Robotics Society of Japan, 1C36, 2002
- Daisuke Sato, Ikuo Mizuuchi, Tomoaki Yoshikai, Masayuki Inaba, and Hirochika Inoue:
``Human Intention Recognition System by a Robot with Sensors'',
Proceedings of the 20th Annual Conference of the Robotics Society of Japan, 3G19, 2002
- Ikuo Mizuuchi, Ryosuke Tajima, Tomoaki Yoshikai, Daisuke Sato, Koichi Nagashima, Masayuki Inaba, Yasuo Kuniyoshi, and Hirochika Inoue:
"The Design and Control of the Flexible Spine of a Fully Tendon-Driven Humanoid ``Kenta''",
Proceedings of the 2002 IEEE/RSJ International Conference on Intelligent Robots and Systems,
pp.2527--2532, 2002
- Tomoaki Yoshikai, Daisuke Sato, Ryosuke Tajima, Ikuo Mizuuchi, Yasuo Kuniyoshi, Masayuki Inaba, and Hirochika Inoue:
``Adaptive behavior of tendon-driven humanoid 'Kenta' by integration among voluntary behaviors,reflexes,and reactive behaviors'',
2002 JSME Conference On Robotics And Mechatronics, 2P2-L06, 2002
- Ikuo Mizuuchi, Ryosuke Tajima, Koichi Nagashima, Tomoaki Yoshikai, Daisuke Sato, Masayuki Inaba, Yasuo Kuniyoshi, and Hirochika Inoue:
``The extensible onbody system of the whole-body tendon-driven spine-humanoid Kenta which has multiple types of inputs/outputs'',
2002 JSME Conference On Robotics And Mechatronics, 1P1-F02, 2002
- Masayuki Inaba, Ikuo Mizuuchi, Ryosuke Tajima, Tomoaki Yoshikai, Koichi Nagashima, and Hirochika Inoue:
``Building Spined Muscle-Tendon Humanoid'',
Proceedings of International Symposium on Robotics Research, 2001
- M. Inaba, K. Nagashima, I. Mizuuchi, R. Tajima, T. Yoshikai, Y. Kuniyoshi, and H. Inoue:
"Development of the tendon-driven humanoid `Kenta' with flexible spine",
Proc. of the 19th Annual Conference of the Robotics Society of Japan,
pp.775--776, 2001
- I. Mizuuchi, M. Inaba, K. Nagashima, R. Tajima, T. Yoshikai, Y. Kuniyoshi, and H. Inoue:
"Design and control of a flexible spine for the whole-body humanoid `Kenta'",
Proc. of the 19th Annual Conference of the Robotics Society of Japan,
pp.777--778, 2001
- R. Tajima, I. Mizuuchi, T. Yoshikai, K. Nagashima, Y. Kuniyoshi, M. Inaba, and H. Inoue:
"The Limb Structure with Ball and Socket Joints for the Humanoid `Kenta'",
Proc. of the 19th Annual Conference of the Robotics Society of Japan,
pp.779--780, 2001
- T. Yoshikai, M. Inaba, I. Mizuuchi, R. Tajima, K. Nagashima, H. Waita, Y. Kuniyoshi, and H. Inoue:
"Eyeball structure and attention control for the flexible-spine humanoid `Kenta' --- Kenta: A tendon-driven humanoid with flexible spine ---",
Proc. of the 19th Annual Conference of the Robotics Society of Japan,
pp.781--782, 2001
- M. Inaba, I. Mizuuchi, R. Tajima, T. Yoshikai, K. Nagashima, H. Waita, Y. Kuniyoshi, and H. Inoue:
"Adaptive body reactions to nursing operations for training with humanoid",
Proc. of the 19th Annual Conference of the Robotics Society of Japan,
pp.783--784, 2001
|
|
|