|
|
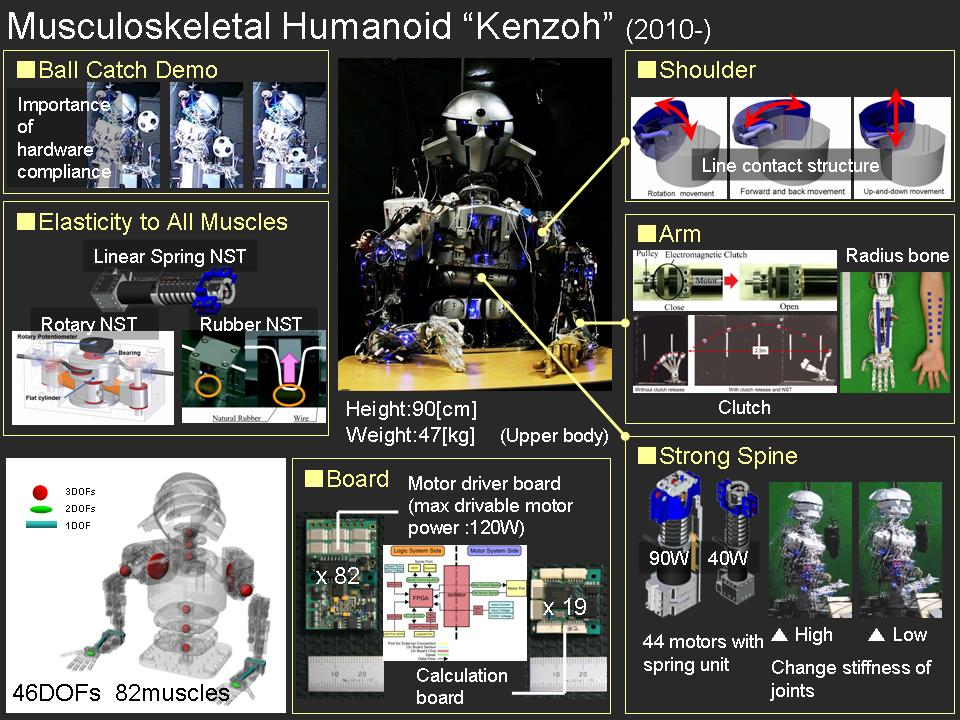
Kenzoh: Musculoskeletal Humanoid with Variable Stiffness Actuators
- Papers
-
Yuto Nakanishi, Tamon Izawa, Tomoko Kurotobi, Junichi Urata, Kei
Okada and Masayuki Inaba:
Achievement of Complex Contact Motion with Environments by Musculoskeletal Humanoid using Humanlike Shock Absorption Strategy,
in Proceedings of the 2011 IEEE-RAS International Conference on Intelligent Robots and Systems (IROS 2012), pp.1815--1820, 2012.
-
Nobuyuki Ito, Junichi Urata, Yuto Nakanishi, Kei Okada, Masayuki Inaba:
Development of Small Motor Driver Integrating Sensor Circuit and Interchengeable Communication Board,
Journal of Robotics and Mechatronics, Vol.23, No.3, pp.443--450, 2011.
-
Masahiko Osada, Tamon Izawa, Junichi Urata, Yuto Nakanishi, Kei Okada, Masayuki Inaba:
Approach of “planar muscle” suitable for musculoskeletal humanoids, especially for their body trunk with spine having multiple vertebral,
in Proceedings of the 2011 IEEE-RAS International Conference on Humanoid Robots (Humanoids 2011), pp.358--363, 2011.
-
Masahiko Osada, Hironori Mizoguchi, Yuki Asano, Toyotaka Kozuki, Junichi Urata, Yuto Nakanishi, Kei Okada, Masayuki Inaba:
Design of Humanoid Body Trunk with“Multiple Spine Structure” and “Planar-muscle-driven” System for Achievement of Humanlike Powerful and Lithe Motion,
in Proceedings of the 2011 IEEE International Conference on Robotics and Biomimetics, pp.2217--2222, 2011.
-
Yuto Nakanishi, Tamon Izawa, Masahiko Osada, Nobuyuki Ito, Shigeki Ohta, Junichi Urata, Masayuki Inaba:
Development of Musculoskeletal Humanoid Kenzoh with Mechanical Compliance Changeable Tendons by Nonlinear Spring Unit,
in Proceedings of The 2011 IEEE International Conference on Robotics and Biomimetics(IEEE-ROBIO2011), 2011.
-
Masahiko Osada, Nobuyuki Ito, Nakanish Yuto, Masayuki Inaba:
Stiffness Readout in Musculo-Skeletal Humanoid Robot by Using Rotary Potentiometer,
in Proceedings of IEEE Sensors 2010 Conference, pp.2329--2333, 2010.
-
Masahiko Osada, Nobuyuki Ito, Yuto Nakanishi, Masayuki Inaba:
Realization of Flexible Motion by Musculoskeletal Humanoid "Kojiro" with Add-on Nonlinear Spring Units,
in Proceedings of the 2010 IEEE-RAS International Conference on Humanoid Robots (Humanoids 2010), pp.174--179, 2010.
Nobuyuki Ito, Junichi Urata, Yuto Nakanishi, Kei Okada, Masayuki Inaba:
Development of Very Small High Output Motor Driver for Realizing Forceful Musculoskeletal Humanoids,
in Proceedings of the 2010 IEEE-RAS International Conference on Humanoid Robots (Humanoids 2010), pp.385--390, 2010.
-
Tamon Izawa, Yuto Nakanishi, Nobuyuki Ito, Masahiko Osada, Kazuo Hongo, Shigeki Ohta, Tomoaki Yoshikai, Kei Okada, Masayuki Inaba:
Development of Stiffness Changeable Multijoint Cervical Structure with Soft Sensor Flesh for Musculo-skeletal Humanoids,
in Proceedings of the 2010 IEEE-RAS International Conference on Humanoid Robots (Humanoids 2010), pp.665--670, 2010.
|
|
|