|
|
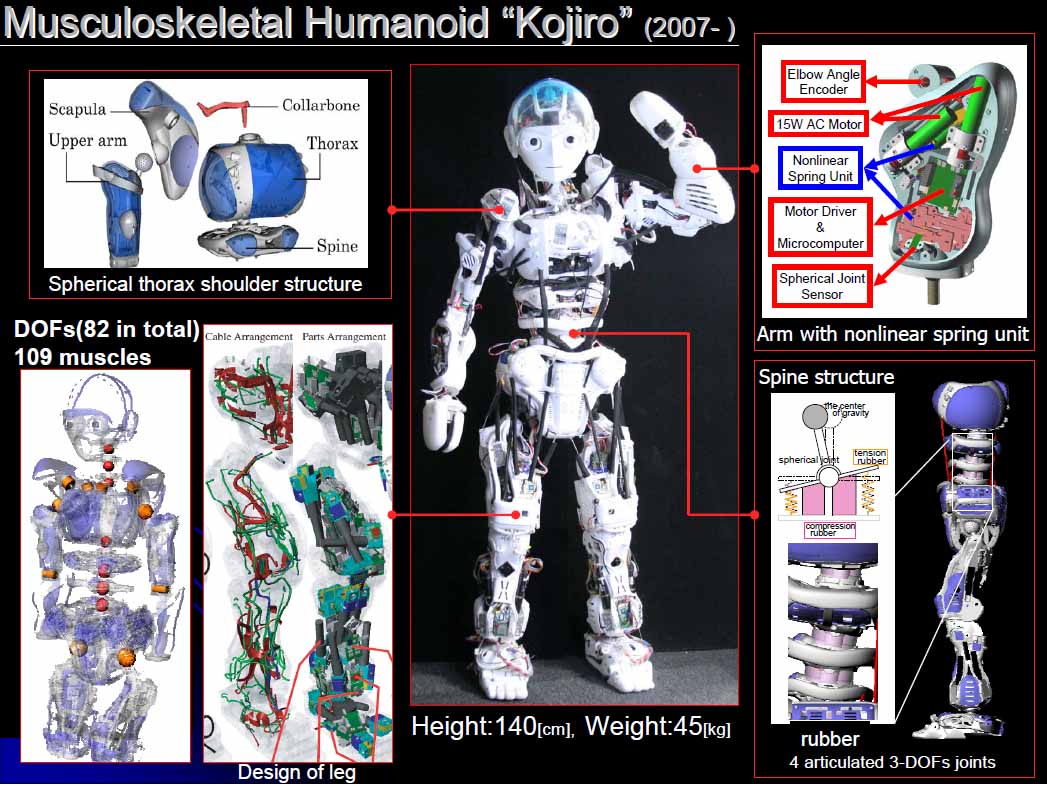
Kojiro: Powered Kotaro
- Papers
- Ikuo Mizuuchi, Yuto Nakanishi, Yoshinao Sodeyama, Yuta Namiki,
Tamaki Nishino, Naoya Muramatsu, Junichi Urata, Kazuo Hongo, Tomoaki
Yoshikai, Masayuki Inaba: An Advanced Musculoskeletal Humanoid
Kojiro, in Proceedings of the 2007 IEEE-RAS International Conference
on Humanoid Robots (Humanoids 2007), 2007.
- Ikuo Mizuuchi, Tamaki Nishino, Yoshinao Sodeyama, Yuto
Nakanishi, Yuta Namiki, Tomoaki Yoshikai, Masayuki Inaba: An
Autonomous Reactive System for Humanoids Equipped with Very Many
Actuators and Sensors, in Proceedings of the 2007 IEEE-RAS
International Conference on Humanoid Robots (Humanoids 2007), 2007.
- Yuto Nakanishi, Yuta Namiki, Kazuo Hongo, Junichi Urata, Ikuo
Mizuuchi, Masayuki Inaba: Design of the Musculoskeletal Trunk and
Realization of Powerful Motions Using Spines, in Proceedings of the
2007 IEEE-RAS International Conference on Humanoid Robots (Humanoids
2007), 2007.
- Yuto Nakanishi, Yuta Namiki, Kazuo Hongo, Junichi Urata, Ikuo
Mizuuchi, Masayuki Inaba: Realization of Large Joint Movement while
Standing by a Musculoskeletal Humanoid Using its Spine and Legs
Coordinately, in Proceedings of The 2008 IEEE/RSJ International
Conference on Intelligent Robots and Systems, pp.205--210,
2008.
- Yoshinao Sodeyama , Tamaki Nishino, Yuta Namiki, Yuto
Nakanishi, Ikuo Mizuuchi, Masayuki Inaba: The Designs and Motions of
a Shoulder Structure with a Spherical Thorax, Scapulas and
Collarbones for Humanoid ``Kojiro'', in Proceedings of The 2008
IEEE/RSJ International Conference on Intelligent Robots and Systems,
pp.1465--1470, 2008.
- Kazuo Hongo, Yuto Nakanishi, Yuta Namiki, Ikuo Mizuuchi,
Masayuki Inaba: Automatic Parameter Adjustment of Reflexive Walking
of a Musculo-Skeletal Humanoid, in Proceedings of the 2008 IEEE-RAS
International Conference on Humanoid Robots, pp.16--21, 2008.
|
|
|