|
|
Multi-Rotor Flying Robot
- Papers
- 川崎宏治, 趙漠居, 岡田慧, 稲葉雅幸. 可変ピッチプロペラを用いた立位および転がり
移動可能なマルチフィールド対応リング型飛行ロボット. 日本ロボット学会誌,
Vol.32,No.9, pp.807-815, 2014.
- 川崎宏治, 趙漠居, 岡田慧, 稲葉雅幸. バイコプターを連接することにより任意のチルト姿勢を保持し移動制御可能な飛行ロボット. 日本ロボット学会誌, Vol.33, No.4,pp.285-291, 2015.
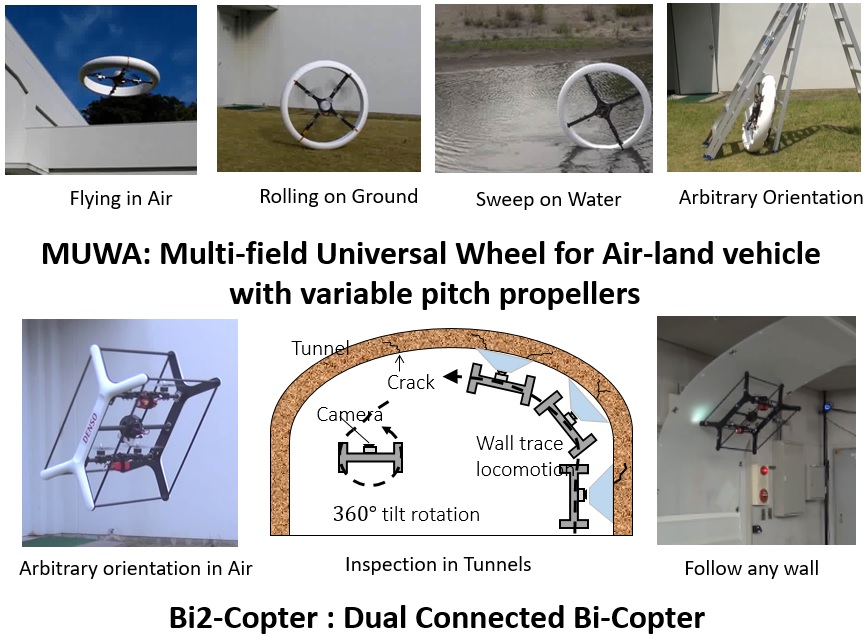
- Koji Kawasaki, Moju Zhao, Kei Okada , and Masayuki Inaba. MUWA:
Multi-field universal wheel for air-land vehicle with quad
variable-pitch propellers. In Proceedings of The 2013 IEEE/RSJ
International Conference on Intelligent Robots and Systems, pp.1880.1885, 2013.
- Kawasaki, Yotaro Motegi, Moju Zhao , Kei Okada, and Masayuki Inaba. Dual Connected
Bi-Copter with New Wall Trace Locomotion Feasibility That Can Fly at Arbitrary
Tilt Angle. In Proceedings of The 2015 IEEE/RSJ International Conference
on Intelligent Robots and Systems, pp.524.531, 2015.
- 川崎宏治, 趙漠居, 岡田慧, 稲葉雅幸. 可変ピッチプロペラを用いた立位および転が
り移動可能なマルチフィールド対応リング型飛行ロボット(日本ロボット学会誌32 巻9
号). 日本ロボット学会第29 回学会誌論文賞, 2015.9.4.
|
|
|