
Grant-in-Aid for Scientific Research (S): 2004-2008
Development of Generative Human-Interaction in Life-Size Humanoid Integrating Robot Intelligence Kernels
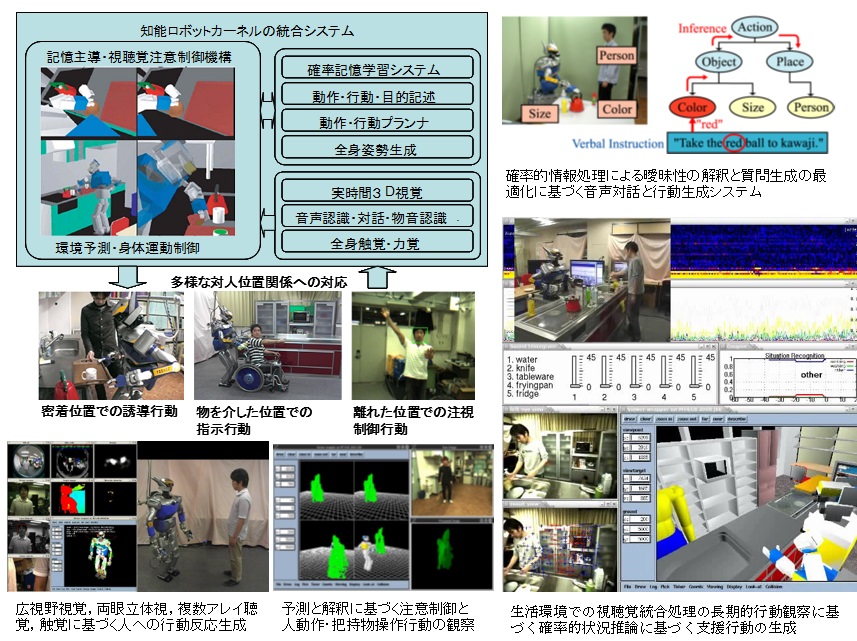
Humanoid is human-shape robot that can walk on biped and stand up with arms if it falls down. It becomes new research target in robotics field especially in Japan. This research aims to show design and implementation of the system kernel of a life-size humanoid as the research platform for intelligent robotics with integrating the whole perception and actuation to extend the research on the generative human-interaction from humanoid. The kernel system includes basic functions (1) behavior generation from observing human behavior and verifying estimated human intentions, (2) coodinating whole-body response and safe motions in human contacting situations, (3) planning and execution for assistive actions with mutual objects operated by human. It will be evaluated with real experiments with life-size humanoid for the intelligent connections from percepion to action through human-centered navigations for humanoid appropriate behaviors in the human-robot situations of distant, direct contact and indirect contact with mutual objects.
- Papers
- Kei Okada, Mitsuharu Kojima, Masayuki Inaba: Object Recognition Through Integrating Multiple Visual Features in Knowledge-Base System Shared in Perception and Action, Journal of Robotics Society of Japan, Vol.26, No.6, pp.537--545, 2008.
- Tetsunari Inamura, Naoki Koji, Naotaka Hatao, Satoru Tokutsu, Junnya Fujimoto, Tomoyuki Sonoda, Kei Okada, Masayuki Inaba: Realization of Trash Separation of Bottles and Cans for Humanoids using Eyes, Hands and Ears, Journal of Robotics Society of Japan, Vol.25, No.6, pp.15-23, 2007.
- Shigeru Kanzaki, Kei Okada, Masayuki Inaba: Guard Behavior Control of a Humanoid based on Preview Control against Predictable Collision, Journal of Robotics Society of Japan, Vol.25, No.7, pp.46-51, 2007.
- Masayuki Inaba, Kei Okada, Ikuo Mizuuchi, Tetsuya Inamura: System Realization of Humanoid Robot - Implementation in Robot System Description Language Euslisp, Computer Software, Vol.23, No.2, pp.45--61, 2006.
- K. Okada, M. Kojima, S. Tokutsu, Y. Mori, T. Maki, M. Inaba : "Task Guided Attention Control and Visual Verification in Tea Serving by the Daily Assistive Humanoid HRP2JSK", Proceedings of The 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp 1551-1557, 2008.
- T. Inamura, K. Okada, S. Tokutsu, N. Hatao, M. Inaba, Hirochika Inoue: "HRP-2W: A humanoid platform for research on support behavior in daily life environments", Robotics and Autonomous System,Vol.57, No.2, pp.145--154, 2009.
- S. Nozawa, T. Maki, M. Kojima, S. Kanzaki, K. Okada, M. Inaba : "Wheelchair Support by a Humanoid Through Integrating Environment Recognition", Proceedings of The 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp 1558-1563, 2008.
- Tetsunari Inamura, Naoki Koji, Naotaka Hatao, Satoru Tokutsu, Junnya Fujimoto, Tomoyuki Sonoda, Kei Okada, Masayuki Inaba: Realization of Trash Separation of Bottles and Cans for Humanoids using Eyes, Hands and Ears, Journal of Robotics Society of Japan, Vol.25, No.6, pp.15-23, 2007.
- Kei Okada, Mitsuharu Kojima, Yuichi Sagawa, Toshiyuki Ichino, Kenji Sato, Masayuki Inaba : "Vision based behavior verification system of humanoid robot for daily environment tasks", 2006 6th IEEE-RAS International Conference on Humanoid Robots (Humanoids 2006), pp.7--12, 2006.
- N. Kojo, T. Inamura, K. Okada, M. Inaba : "Gesture Recognition for Humanoids using Proto-symbol Space", 2006 6th IEEE-RAS International Conference on Humanoid Robots (Humanoids 2006), pp.76-81, 2006.
- T. Ogura, A. Haneda, K. Okada, M. Inaba : "On-site Humanoid Navigation Through Hand-in-Hand Interface", 2005 International Conference on Humanoid Robots, pp.175-180, 2005.
