|
|
科学研究費補助金 基盤研究(S):2014-2018
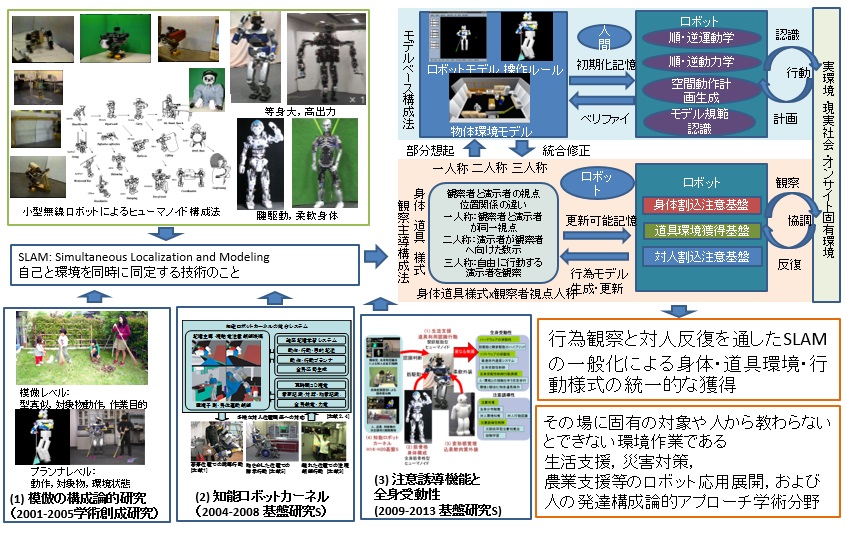
ヒューマノイド系列による行為観察と対人反復に基づく身体・道具環境・行動様式の獲得
研究者のグループでは,物体操作と歩行移動だけでなく多様な全身行動が可
能な人間型ロボットであるヒューマノイドを知能ロボットの一般形ととらえ,
小型から等身大,関節駆動型から筋骨格型まで,それら全てに共通に利用可能
な知能ロボットカーネルを構成してきた.
また,模倣の構成論的研究として,箒などの道具操作を観察し,人,道具,道
具で操作される対象への注視点を順次制御する注視機構を内在させ,身体対応
による動作模倣のレベルから行動プランナ機能による目的レベル模倣を行って
きた.さらに,人がロボットの傍にいて人からの制止や誘導に対応できる注意
誘導機能と全身受動性をそなえた等身大ヒューマノイドへと進めてきている.
本研究は,このような大きさも構造も異なるヒューマノイド系列の研究にお
いて,身体・道具環境・行動様式のモデルを与えることでその多様な行動実現
が可能となるシステム構成法研究の成果の上に,与える形ではなくロボット自
体がいかに獲得できる形で行動実現の再構成が可能となるかを,人間が提示す
る操作から学ぶ「行為観察」と,人から評価を得られる形でロボットが反復習
得を行う「対人反復」,人間がロボットの行動に直接介入して評価を伝える
「割込修正」というプロセスを通して行う獲得問題を取り上げ,実ヒューマノ
イドにおいて身体・道具環境・行動様式が変わっても適切に順応対応してゆけ
るようにする仕組みの基本構成原理とその評価を実証的に明らかにすることを
目的とする.
- 参考文献
-
Yaguchi, Hiroaki, Sato, Kenji, Kojima, Mitsuharu, Sogen, Kiyohiro,
Takaoka, Yutaka, Tsuchinaga, Masayoshi, Yamamoto, Takashi, Inaba,
Masayuki: Development of 3D viewer based teleoperation interface for Human Support Robot HSR,
ROBOMECH Journal, Vol.1, No.1, pp.10, 2014.
-
Wesley P. Chan, Iori Kumagai, Shunichi Nozawa, Yohei Kakiuchi, Kei Okada, Masayuki Inaba:
Implementation of a Robot-Human Object Handover Controller on a Compliant Underactuated Hand Using Joint Position Error Measurements for Grip Force and Load Force Estimations,
in Proceedings of The 2014 IEEE International Conference on Robotics and Automation, pp.1190-1195, 2014.
-
Wesley P. Chan, Yohei Kakiuchi, Kei Okada, Masayuki Inaba: Determining
proper grasp configurations for handovers through observation of
object movement patterns and inter-object interactions during usage, in Proceedings of The 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp.1355-1360, 2014.
-
Toyotaka Kozuki, Takuma Shirai, Yuki Asano, Yotaro Motegi, Yohei Kakiuchi, Kei Okada, Masayuki Inaba:
Muscle-tendon complex control by “Tension controlled Muscle” and “Non-linear Spring Ligament” for real world musculoskeletal body simulator Kenshiro,in Proceedings of The 2014 IEEE International Conference on Biomedical Robotics and Biomechatronics, pp.875--880, 2014.
-
Ryohei Ueda, Shunichi Nozawa, Kei Okada, Masayuki Inaba:
Biped Humanoid Navigation System Supervised through Interruptible User-Interface with Asynchronous Vision and Foot Sensor Monitoring,
in Proceedings of the 2014 IEEE-RAS International Conference on Humanoid Robots (Humanoids 2014), pp.022, 2014.
-
Masaki Murooka, Shintaro Noda, Shunichi Nozawa, Yohei Kakiuchi, Kei
Okada, Masayuki Inaba: Manipulation Strategy Learning for Carrying
Large Objects based on Mapping from Object Physical Property to Object
Manipulation Action in Virtual Environment, in Proceedings of the 2014 IEEE International Conference on Automation Science and Engineering, pp.263-270, 2014.
- Wesley P. Chan, Matthew K. X. J. Pan, Elizabeth A. Croft, Masayuki Inaba:
Characterization of Handover Orientations used by Humans for Efficient Robot to Human Handovers,
in Proceedings of The 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp.1-6, 2015.
- Yuki Asano, Toyotaka Kozuki, Soichi Ookubo, Koji Kawasaki, Takuma
Shirai, Kohei Kimura, Kei Okada, Masayuki Inaba: A Sensor-driver
Integrated Muscle Module with High-tension Measurability and
Flexibility for Tendon-driven Robots, in Proceedings of The 2015
IEEE/RSJ International Conference on Intelligent Robots and Systems,
pp.5960-5965, 2015.
-
Toyotaka Kozuki, Yotaro Motegi, Koji Kawasaki, Yuki Asano, Takuma Shirai, Soichi Ookubo, Yohei Kakiuchi, Kei Okada, Masayuki Inaba:
Development of Musculoskeletal Spine Structure that Fulfills Great Force Requirement in Upper Body Kinematics,
in Proceedings of The 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp.2768--2773, 2015.
-
Yu Ohara, Masaki Murooka, Ryohei Ueda, Shunichi Nozawa, Yohei Kakiuchi, Kei Okada, Masayuki Inaba:
Configurable Autonomy Applicable to Humanoid Manipulation in Unstructured and Communication-Limited Environment,
in Proceedings of the 2015 IEEE-RAS International Conference on Humanoid Robots (Humanoids 2015), pp.373--380, 2015.
-
Soichi Ookubo, Yuki Asano, Toyotaka Kozuki, Takuma Shirai, Kei OKADA, Masayuki INABA:
Learning Nonlinear Muscle-Joint State Mapping Toward Geometric Model-Free Tendon Driven Musculoskeletal Robots,
in Proceedings of the 2015 IEEE-RAS International Conference on Humanoid Robots (Humanoids 2015), pp.765--770, 2015.
-
Kanae Kochigami, Jiang Jun, Yuriko Kakehashi, Chi Wun Au, Yohei Kakiuchi, Kei Okada, Masayuki Inaba:
Walking Together Hand in Hand: Design and Evaluation of Autonomous Robot System That a Robot Recognizes Moving Direction with a Child's Assistance of Pulling Its Hand,
in Proceedings of the 2015 IEEE/SICE International Symposium on System Integration, pp.738--743, 2015.
-
木村 航平, 野沢 峻一, 垣内 洋平, 岡田 慧, 稲葉 雅幸:
能動機能と受動機能の切替制御システムを備えたヒューマノイドの双腕双脚による三輪車操作行動,
日本ロボット学会誌, Vol.34, No.7, pp.468-477, 2016.
-
木村 航平, 浅野 悠紀, 上月 豊隆, 白井 拓磨, 岡田 慧, 稲葉 雅幸:
能動脚と受動脚の協調システムに基づく腱駆動ヒューマノイドによるペダリング操作の実現,
計測自動制御学会論文集, Vol.52, No.8, pp.428-436, 2016.
-
Masaki Murooka, Ryohei Ueda, Shunichi Nozawa, Yohei Kakiuchi, Kei Okada, Masayuki Inaba:
Planning and Execution of Groping Behavior for Contact Sensor based Manipulation in an Unknown Environment,
in Proceedings of The 2016 IEEE International Conference on Robotics and Automation, pp.3955-3962, 2016.
-
Noriaki Takasugi, Kunio Kojima, Shunichi Nozawa, Yohei Kakiuchi, Kei Okada, Masayuki Inaba:
Real-Time Skating Motion Control of Humanoid Robots for Acceleration and Balancing,
in Proceedings of The 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp.1356-1363, 2016.
- Iori Kumagai, Ryohei Ueda, Fumihito Sugai, Shunichi Nozawa, Yohei Kakiuchi, Kei Okada, Masayuki Inaba:
Achievement of localization system for humanoid robots with virtual horizontal scan relative to improved odometry fusing internal sensors and visual information,
in Proceedings of The 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp.666-673, 2016.
- Yasuhiro Ishiguro, Tatsuya Ishikawa, Kunio Kojima, Fumihito Sugai, Shunichi Nozawa, Yohei Kakiuchi, Kei Okada, Masayuki Inaba:
Online Master-Slave Footstep Control for Dynamical Human-Robot Synchronization with Wearable Sole Sensor,
in Proceedings of the 2016 IEEE-RAS International Conference on Humanoid Robots (Humanoids 2016), pp.864--869, 2016.
-
Ryo Terasawa, Shintaro Noda, Kunio Kojima, Ryo Koyama, Fumihito Sugai, Shunichi Nozawa, Yohei Kakiuchi, Kei Okada, Masayuki Inaba:
Achievement of Dynamic Tennis Swing Motion by Offline Motion Planning
and Online Trajectory Modification Based on Optimization with a
Humanoid Robot, in Proceedings of the 2016 IEEE-RAS International Conference on Humanoid Robots (Humanoids 2016), pp.1094--1100, 2016.
-
Masaya Kawamura, Soichi Ookubo, Yuki Asano, Toyotaka Kozuki, Kei Okada, Masayuki Inaba:
A Joint-Space Controller Based on Redundant Muscle Tension for Multiple DOF Joints in Musculoskeletal Humanoids,
in Proceedings of the 2016 IEEE-RAS International Conference on Humanoid Robots (Humanoids 2016), pp.814--819, 2016.
-
Yuki Asano, Toyotaka Kozuki, Soichi Ookubo, Masaya Kawamura, Shinsuke Nakashima, Takeshi Katayama, Iori Yanokura, Toshinori Hirose, Kento Kawaharazuka, Shogo Makino, Youhei Kakiuchi, Kei Okada, Masayuki Inaba:
Human Mimetic Musculoskeletal Humanoid Kengoro toward Real World Physically Interactive Actions,
in Proceedings of the 2016 IEEE-RAS International Conference on Humanoid Robots (Humanoids 2016), pp.876--883, 2016.
|
|
|

 までお願いします.
までお願いします.