
ヘッドマウントモデル獲得システム
頭部に三次元計測センサを装着し, 人が手に取って見る日用品、手で操作する道具、家具などのモデルを 生成することで,環境の物体や空間のモデル,人がどこを持って どう扱うかの知識を獲得するシステムの研究.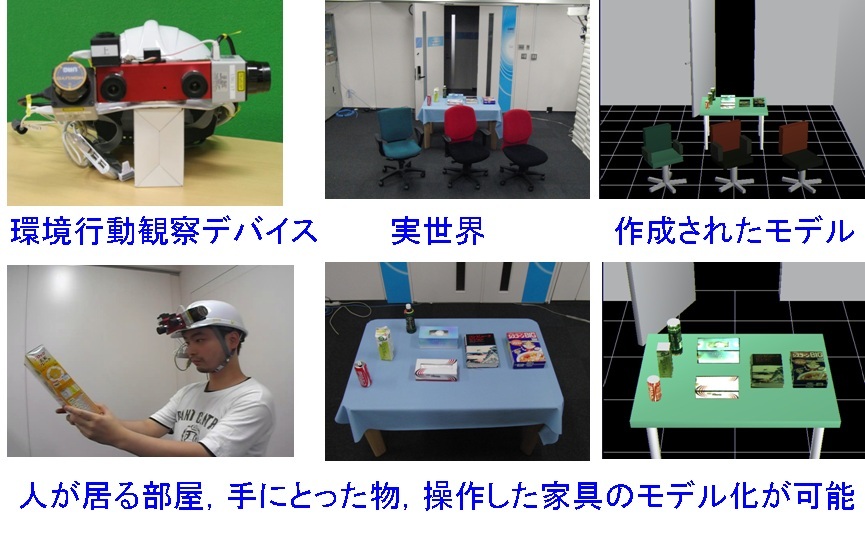
- 参考文献
- Hiroaki Yaguchi, Nikolaus Zaoputra, Naotaka Hatao, Kimitoshi Yamazaki, Kei Okada, Masayuki Inaba: View-based Localization Using Head-Mounted Multi Sensors Information, Journal of Robotics and Mechatronics, Vol.21, No.3, pp.376--383, 2009.
- 矢口裕明, 岡田慧, 稲葉雅幸: ヘッドマウントステレオビジョンを用いたカメラ姿勢と環境モデルの同時推定手法, 日本ロボット学会誌, Vol.26, No.6, pp.470--475, 2008.
 までお願いします.
までお願いします.