
Intelligent Robot System Environment
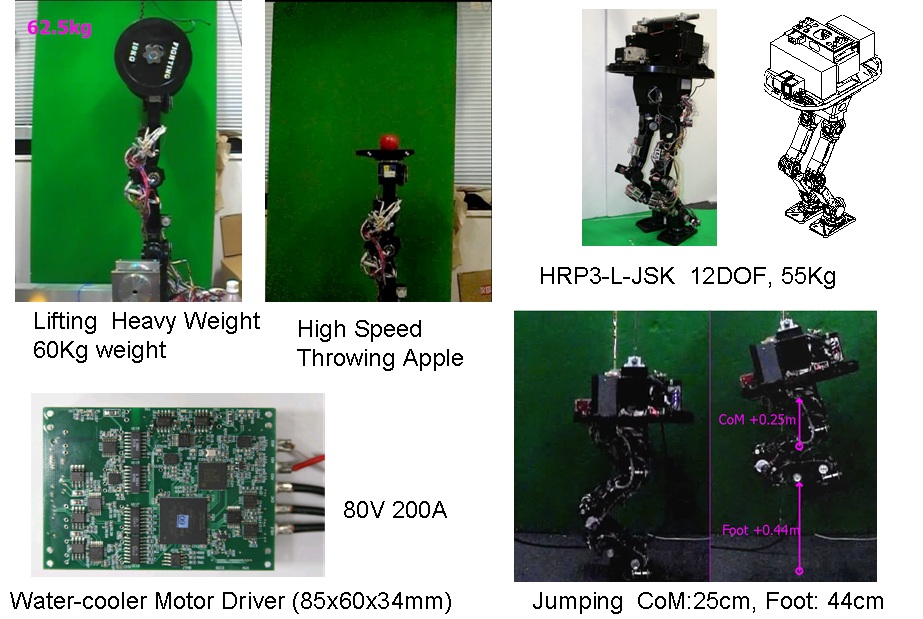
- Junichi Urata, Yuto Nakanishi, Kei Okada, Masayuki Inaba: Design of High Torque and High Speed leg Module for High Power Humanoid, in Proceedings of The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp.4497--4502, 2010.
- Junichi Urata, Yuto Nakanish, Kei Okada, Masayuki Inaba: Design of High Torque and High Speed Leg Module for High Power Humanoid, Journal of Robotics Society of Japan, Vol.28, No.7, pp.91-97, 2010.
