|
|
腱臓
- Papers
-
Yuto Nakanishi, Tamon Izawa, Tomoko Kurotobi, Junichi Urata, Kei
Okada and Masayuki Inaba:
Achievement of Complex Contact Motion with Environments by Musculoskeletal Humanoid using Humanlike Shock Absorption Strategy,
in Proceedings of the 2011 IEEE-RAS International Conference on Intelligent Robots and Systems (IROS 2012), pp.1815--1820, 2012.
-
Nobuyuki Ito, Junichi Urata, Yuto Nakanishi, Kei Okada, Masayuki Inaba:
Development of Small Motor Driver Integrating Sensor Circuit and Interchengeable Communication Board,
Journal of Robotics and Mechatronics, Vol.23, No.3, pp.443--450, 2011.
-
Masahiko Osada, Tamon Izawa, Junichi Urata, Yuto Nakanishi, Kei Okada, Masayuki Inaba:
Approach of “planar muscle” suitable for musculoskeletal humanoids, especially for their body trunk with spine having multiple vertebral,
in Proceedings of the 2011 IEEE-RAS International Conference on Humanoid Robots (Humanoids 2011), pp.358--363, 2011.
-
Masahiko Osada, Hironori Mizoguchi, Yuki Asano, Toyotaka Kozuki, Junichi Urata, Yuto Nakanishi, Kei Okada, Masayuki Inaba:
Design of Humanoid Body Trunk with“Multiple Spine Structure” and “Planar-muscle-driven” System for Achievement of Humanlike Powerful and Lithe Motion,
in Proceedings of the 2011 IEEE International Conference on Robotics and Biomimetics, pp.2217--2222, 2011.
-
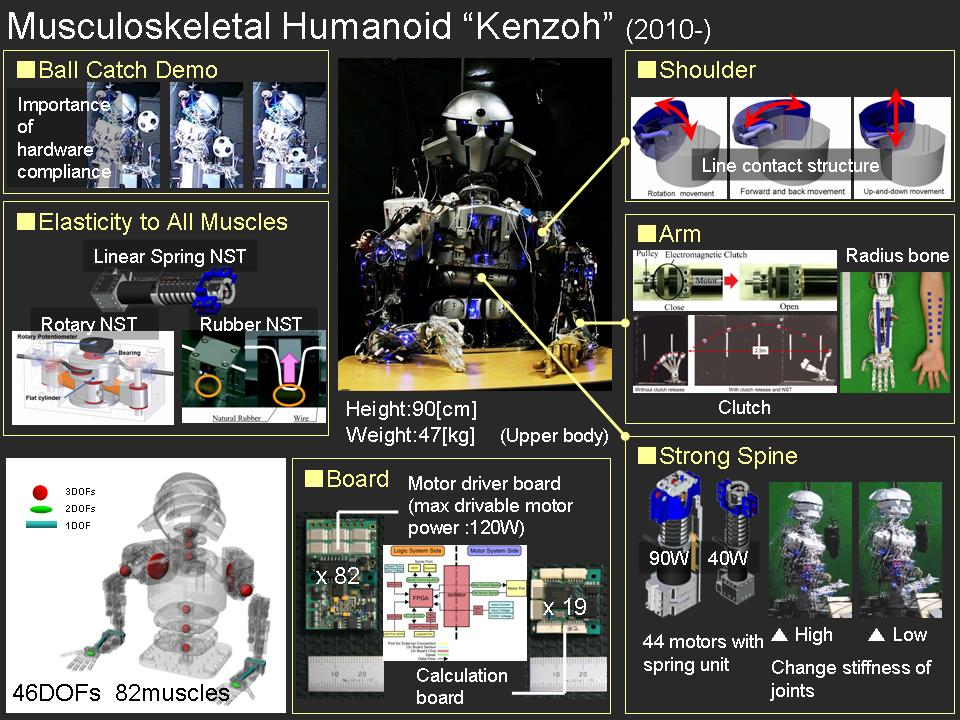
Yuto Nakanishi, Tamon Izawa, Masahiko Osada, Nobuyuki Ito, Shigeki Ohta, Junichi Urata, Masayuki Inaba:
Development of Musculoskeletal Humanoid Kenzoh with Mechanical Compliance Changeable Tendons by Nonlinear Spring Unit,
in Proceedings of The 2011 IEEE International Conference on Robotics and Biomimetics(IEEE-ROBIO2011), 2011.
-
伊東 信之, 中西 雄飛, 白井 拓磨, 長田 将彦, 伊沢 多聞, 岡田 慧, 稲葉 雅幸:
電磁クラッチを用いた開放機構を持つ腱駆動アームの開発,
in 日本機械学会ロボティクス・メカトロニクス講演会'11 講演論文集, 2A1-H15, 2011.
-
黒飛 朋子, 伊東 信之, 太田 茂樹, 伊沢 多聞, 長田 将彦, 中西 雄飛, 岡田 慧, 稲葉 雅幸:
腱駆動ヒューマノイドのための筋配置ダイレクトマップ型ウェアラブル操縦デバイスの開発と応用,
in 日本機械学会ロボティクス・メカトロニクス講演会'11 講演論文集, 2A1-I06, 2011.
-
長田 将彦, 浦田 順一, 中西 雄飛, 岡田 慧, 稲葉 雅幸:
筋骨格ヒューマノイドの多節脊椎に適した面状筋構造の提案,
in 日本機械学会ロボティクス・メカトロニクス講演会'11 講演論文集, 2A1-I05, 2011.
-
伊沢多聞, 中西雄飛, 黒飛朋子, 浅野悠紀, 岡田慧, 稲葉 雅幸:
機械的柔軟性とフィードフォワード反射モジュールを用いた筋骨格ヒューマノイドの捕球動作の実現,
in 第29回日本ロボット学会学術講演会講演論文集, 2P1-2, 2011.
-
黒飛朋子, 中西雄飛, 岡田慧, 稲葉 雅幸:
視覚による手先位置姿勢認識に基づく腱駆動操縦スーツ-ヒューマノイド間の筋運動指令入出力関係の修正獲得,
in 第29回日本ロボット学会学術講演会講演論文集, 2P1-6, 2011.
-
長田将彦, 梯 百合子, 浦田順一, 中西雄飛, 岡田慧, 稲葉雅幸:
人間の力強くしなやかな動作を実現する面状筋駆動多節脊椎の開発,
in 第29回日本ロボット学会学術講演会講演論文集, 2P1-3, 2011.
-
伊東信之, 浦田順一, 中西雄飛, 岡田慧, 稲葉雅幸:
ヒューマノイドの為の超小型センサ統合大出力モータドライバの開発,
JSME Fellow Award for Outstanding Young Engineers, ROBOMEC2010, 2011.
-
Masahiko Osada, Nobuyuki Ito, Nakanish Yuto, Masayuki Inaba:
Stiffness Readout in Musculo-Skeletal Humanoid Robot by Using Rotary Potentiometer,
in Proceedings of IEEE Sensors 2010 Conference, pp.2329--2333, 2010.
-
Masahiko Osada, Nobuyuki Ito, Yuto Nakanishi, Masayuki Inaba:
Realization of Flexible Motion by Musculoskeletal Humanoid "Kojiro" with Add-on Nonlinear Spring Units,
in Proceedings of the 2010 IEEE-RAS International Conference on Humanoid Robots (Humanoids 2010), pp.174--179, 2010.
Nobuyuki Ito, Junichi Urata, Yuto Nakanishi, Kei Okada, Masayuki Inaba:
Development of Very Small High Output Motor Driver for Realizing Forceful Musculoskeletal Humanoids,
in Proceedings of the 2010 IEEE-RAS International Conference on Humanoid Robots (Humanoids 2010), pp.385--390, 2010.
-
Tamon Izawa, Yuto Nakanishi, Nobuyuki Ito, Masahiko Osada, Kazuo Hongo, Shigeki Ohta, Tomoaki Yoshikai, Kei Okada, Masayuki Inaba:
Development of Stiffness Changeable Multijoint Cervical Structure with Soft Sensor Flesh for Musculo-skeletal Humanoids,
in Proceedings of the 2010 IEEE-RAS International Conference on Humanoid Robots (Humanoids 2010), pp.665--670, 2010.
-
伊東信之, 浦田順一, 中西雄飛, 岡田慧, 稲葉雅幸:
ヒューマノイドの為の超小型センサ統合大出力モータドライバの開発,
in 日本機械学会ロボティクス・メカトロニクス講演会'10 講演論文集, 2P1-C17, 2010.
-
長田 将彦, 伊沢 多聞, 伊東 信之, 本郷 一生, 中西 雄飛, 稲葉 雅幸:
筋骨格ヒューマノイドの全身に搭載可能な回転機構を用いた非線形ばねユニットの開発,
in 日本機械学会ロボティクス・メカトロニクス講演会'10 講演論文集, 2A2-B11, 2010.
-
長田 将彦, 白井 拓磨, 小林 巧実, 本郷 一生, 中西 雄飛, 稲葉 雅幸:
腱駆動機構に容易に追加可能なアドオン型非線形ばねユニットの開発,
in 日本機械学会ロボティクス・メカトロニクス講演会'10 講演論文集, 2A2-B12, 2010.
-
伊沢 多聞, 小林 一也, 伊東 信之, 長田 将彦, 本郷 一生, 太田 茂樹, 浦田 順一, 中西 雄飛, 岡田 慧, 稲葉 雅幸:
剛性可変機能を有する腱駆動ヒューマノイドのための冗長多自由度頸部構造の開発,
in 日本機械学会ロボティクス・メカトロニクス講演会'10 講演論文集, 2A2-A05, 2010.
-
中西雄飛, 伊沢多聞, 長田将彦, 伊東信之, 太田茂樹, 本郷一生, 浦田順一, 稲葉雅幸:
ダイナミックな運動実現へ向けた全筋剛性可変機構搭載高出力・多自由度筋骨格ヒューマノイド腱臓の開発,
in 第28回日本ロボット学会学術講演会講演論文集, 2A2-1, 2010.
- 伊東信之, 長田将彦, 中西雄飛, 稲葉雅幸:
新型腱駆動ヒューマノイド腱臓と剛性調整機構を備えた腕部の開発,
in 第28回日本ロボット学会学術講演会講演論文集, 2A2-2, 2010.
-
伊沢多聞, 小林一也, 中西雄飛, 吉海智晃, 稲葉雅幸:
筋骨格ヒューマノイドのための柔軟外装構造の開発,
in 第28回日本ロボット学会学術講演会講演論文集, 2A2-7, 2010.
|
|
|

 までお願いします.
までお願いします.