
マルチリンク変形飛行ロボット
- 文献
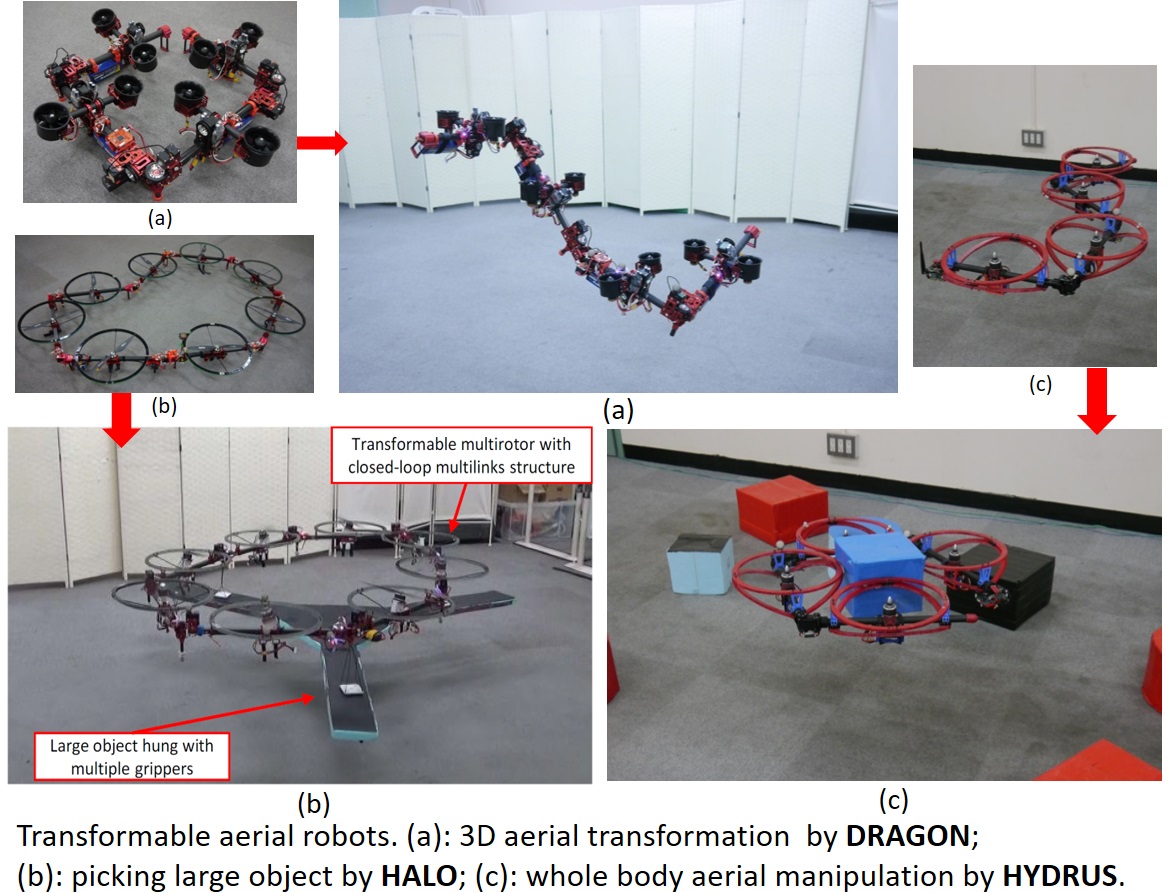
- Moju Zhao, Tomoki Anzai, Fan Shi, Xiangyu Chen, Kei Okada, Masayuki Inaba: Design, Modeling and Control of Aerial Robot DRAGON: Dual-Rotor Embedded Multilink Robot with the Ability of Multi-Degree-of-Freedom Aerial Transformation,in IEEE Robotics and Automation Letters, vol. 3, no. 2, pp. 1176-1183, 2018.
- Tomoki Anzai, Moju Zhao, Shunichi Nozawa, Fan Shi, Kei Okada, Masayuki Inaba: Aerial Grasping Based on Shape Adaptive Transformation by HALO: Horizontal Plane Transformable Aerial Robot with Closed-Loop Multilinks Structure, in Proceedings of The 2018 IEEE International Conference on Robotics and Automation, 2018.
- Tomoki Anzai, Moju Zhao, Xiangyu Chen, Fan Shi, Koji Kawasaki, Kei Okada, Masayuki Inaba:Multilinked Multirotor with Internal Communication System for Multiple Objects Transportation based on Form Optimization Method, in Proceedings of The 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp.5977-5984, 2017.
- Moju Zhao, Koji Kawasaki, Xiangyu Chen, Shintaro Noda, Kei Okada, Masayuki Inaba: Whole-body aerial manipulation by transformable multirotor with two-dimensional multilinks, in Proceedings of The 2017 IEEE International Conference on Robotics and Automation, pp.5175-5182, 2017.
- Moju Zhao, Koji Kawasaki, Kei Okada, Masayuki Inaba: Transformable multirotor with two-dimensional multilinks: modeling, control, and motion planning for aerial transformation, Advanced Robotics, Vol.30, No.13, pp.825--845, 2016.
- Moju Zhao, Koji Kawasaki, Xiangyu Chen, Yohei Kakiuchi, Kei Okada, Masayuki Inaba: Transformable Multirotor with Two-Dimensional Multilinks: Modeling, Control, and Whole-Body Aerial Manipulation,in 2016 International Symposium on Experimental Robotics, pp.515--524, Springer International Publishing, 2017.
- 受賞
- Moju Zhao, Tomoki Anzai, Fan Shi, Xiangyu Chen, Kei Okada, Masayuki Inaba: Design, Modeling and Control of Aerial Robot DRAGON: Dual-Rotor Embedded Multilink Robot with the Ability of Multi-Degree-of-Freedom Aerial Transformation, Best Paper Award on Unmanned Aerial Vehicles, ICRA2018, 2018.
- Moju Zhao, Koji Kawasaki, Kei Okada, Masayuki Inaba: Transformable multirotor with two-dimensional multilinks: modeling, control, and motion planning for aerial transformation, 2017 Advanced Robotics Best Paper Award, 2017.
