|
|
科学研究費補助金 基盤研究(S): 2009-2013
全身受動性と注意誘導性を備えた等身大ヒューマノイドへの発展的身体行動構成法の研究
人の生活空間において人を支援することを期待され,家庭における支援ロボッ
ト研究の対象となっている等身大ヒューマノイドであるが,日常空間における
適切な認識判断機能や人と触れ合える柔軟な身体構造は,未だ家庭環境へ入っ
て人間と共存していけるほど成熟していない.
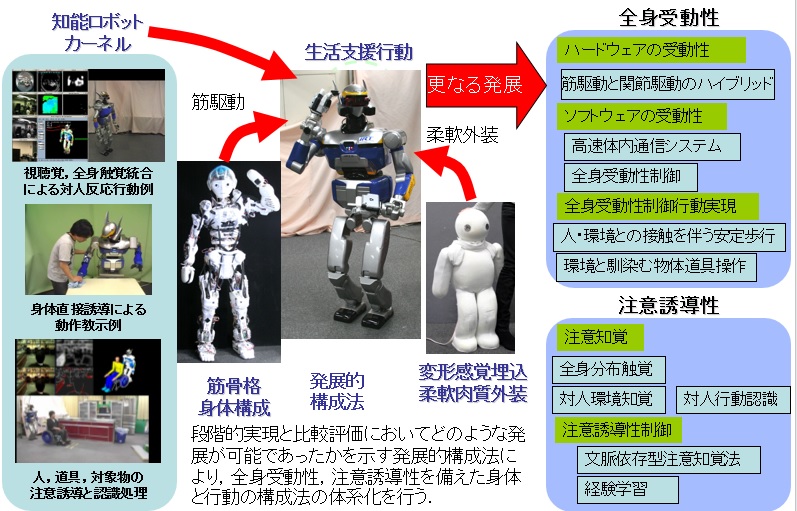
本研究では,等身大ヒューマノイドが多様な作業を実行している際に,人の存
在に気づき,人が寄りかかったり,不意の制止や注意喚起の働きかけに安全に
反応でき,その働きかけを行なった人がロボットの行動を即座に誘導できるよ
うにするために不可欠な全身の受動性と注意誘導性をどのように備えることが
できるかをテーマとし,身体ハードウェアと行動制御ソフトウェアの両面から
段階的に検証可能で発展の差異を明示的に記述可能な形で構成する発展的構成
法によってその有意性を明らかにすることを目的とする.
本研究の特色は,ソフトウェアの部分だけでなく,身体のハードウェア自体を
発展的に構成し,柔軟性を必要とする物体や環境との動的な接触行動の実現を
行えるようにし,かつ,その行動中に人からの働きかけに気づいてそれを受け
止められる仕組みを身体と自律反応系の両面から構築することを行っている.
- 参考文献
- 稲葉 雅幸:
知能ロボットフロンティアとしての筋骨格ヒューマノイド,
日本ロボット学会誌, Vol.28, No.6, pp.666--671, 2010.
- 浦田 順一, 中西 雄飛, 岡田 慧, 稲葉 雅幸:
高速・高トルク動作のための大出力2脚ロボットの開発,
日本ロボット学会誌, Vol.28, No.7, pp.91--97, 2010.
- 稲葉 雅幸:
知能ロボットのソフトウェア,
日本ロボット学会誌, Vol.30, No.9, pp.824--829, 2012.
-
Kotaro Nagahama, Tomohiro Nishino, Kimitoshi Yamazaki, Kei Okada, Masayuki Inaba:
Attention Region Detection and Tracking for Observing a Person Manipulating Day-to-day Objects,
International Journal of Mechatronics and Automation, Vol.3, No.1, pp.58--67, 2013.
- Yuto Nakanishi, Shigeki Ohta, Takuma Shirai, Yuki Asano, Toyotaka Kozuki, Yuriko Kakehashi, Hironori Mizoguchi, Tomoko Kurotobi, Yotaro Motegi, Kazuhiro Sasabuchi, Junichi Urata, Kei Okadaand Ikuo Mizuuchi, Masayuki Inaba:
Design Approach of Biologically-Inspired Musculoskeletal Humanoids,
International Journal of Advanced Robotic Systems, Vol.10, pp.1-18, 2013.
-
熊谷伊織, 小林一也, 野沢峻一, 垣内洋平, 吉海智晃, 岡田慧, 稲葉雅幸:
柔軟変形多軸触覚を分散配置した等身大ヒューマノイド用外装による物体受渡作用の検知反応行動の実現,
日本ロボット学会誌, Vol.31, No.10, pp.985-991, 2013.
-
小林一也, 吉海智晃, 後藤健文, 稲葉雅幸:
柔軟性多層分布外装と関節脱臼復帰機構を備えたロボットの転倒・転落時衝撃吸収自己保護行動の実現,
日本ロボット学会誌, Vol.31, No.4, pp.416--423, 2013.
-
東 馳, 垣内 洋平, 岡田 慧, 稲葉 雅幸:
対話画面インタフェースでのマルチタッチジェスチャ指示と操作候補提示に基づくロボット遠隔操作システム,
日本ロボット学会誌, Vol.31, No.4, pp.409--415, 2013.
- Masahiko Osada, Hironori Mizoguchi, Yuki Asano, Toyotaka Kozuki,
Junichi Urata, Yuto Nakanishi, Kei Okada, Masayuki Inaba: Application
of "Planar Muscle" with Soft Skin-Like Outer Function Suitable for
Musculoskeletal Humanoid, Journal of Robotics and Mechatronics, Vol.24, No.6, pp.1080-1088, 2012.
-
Yuto Nakanishi, Shigeki Ohta, Takuma Shirai, Yuki Asano, Toyotaka Kozuki, Yuriko Kakehashi, Hironori Mizoguchi, Tomoko Kurotobi, Yotaro Motegi, Kazuhiro Sasabuchi, Junichi Urata, Kei Okadaand Ikuo Mizuuchi, Masayuki Inaba:
Design Approach of Biologically-Inspired Musculoskeletal Humanoids,
International Journal of Advanced Robotic Systems, Vol.10, pp.1-18, 2013.
-
Yuto Nakanishi, Yuki Asano, Toyotaka Kozuki, Hironori Mizoguchi, Yotaro Motegi, Masahiko Osada, Takuma Shirai, Junichi Urata, Kei Okada, Masayuki Inaba:
Design Concept of Detail Musculoskeletal Humanoid "Kenshiro" -Toward a real human body musculoskeletal simulator-,
in Proceedings of the 2012 IEEE-RAS International Conference on Humanoid Robots (Humanoids 2012), pp.1-6, 2012.
- Yoshito Ito, Takuya Nakaoka, Junichi Urata, Yuto Nakanishi, Kei Okada, Masayuki Inaba:
Design and Development of a Tendon-driven and Axial-driven Hybrid Humanoid Leg with High-Power Motor Driving System,
in Proceedings of the 2012 IEEE-RAS International Conference on Humanoid Robots (Humanoids 2012), pp.475--480, 2012.
-
Shunichi Nozawa, Masaki Murooka, Shintaro Noda, Kei Okada,, Masayuki Inaba:
Description and Execution of Humanoid's Object Manipulation based on Object-environment-robot Contact States,
in Proceedings of The 201 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2608 - 2615, 2013.
|
|
|

 までお願いします.
までお願いします.