
Grant-in-Aid for Scientific Research (S): 2009-2013
Developmental Approach in Configuring Body and Behavior of Life-size Humanoids with Whole-body Passivity and Attention Inductivityw
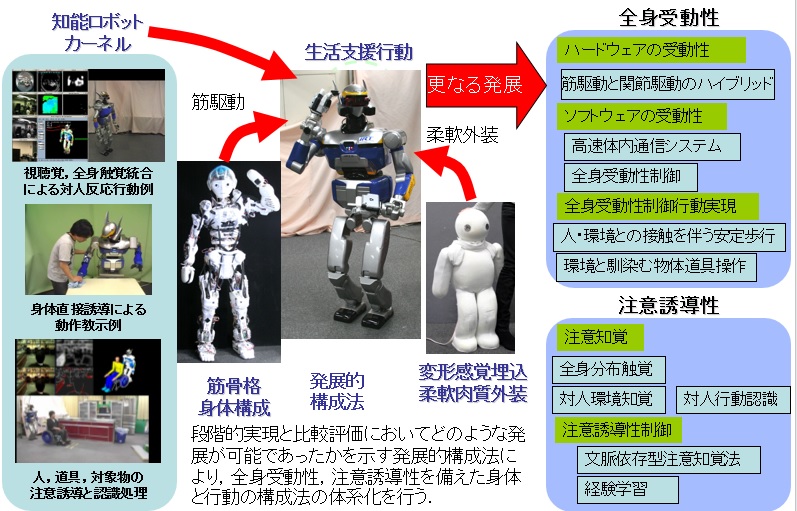
Research and development of life-size hu-manoids has progressed towards assistance in daily life, but it is still hard to ensure the safety to human and environment due to lack of rich capabilities to recognize and reason daily situa-tions and enough flexibility in body structures for direct contact with human and environment. The goal of this research is to reveal the effec-tive configuration method of both body design hardware and motion control software for life-size humanoid with whole-body passivity and attention inductivity through developing the functions incrementally and comparing the difference between each steps of development in describable form, where a humanoid can detect human presence and safely react to any direct contact to human or environment while it is performing goal-oriented tasks and also human can interrupt and navigate the humanoid mo-tions through attention-seeking behaviors and inductive behaviors.
- Papers
- Masayuki Inaba: Musculoskeletal humanoid as intelligent robot frontier, Journal of Robotics Society of Japan, Vol.28, No.6, pp.666--671, 2010.
- Junichi Urata, Yuto Nakanish, Kei Okada, Masayuki Inaba: Design of High Torque and High Speed Leg Module for High Power Humanoid, Journal of Robotics Society of Japan, Vol.28, No.7, pp.91--97, 2010.
- Masayuki Inaba: Software for Intelligent Robots, Journal of Robotics Society of Japan, Vol.30, No.9, pp.824--829, 2012.
- Kotaro Nagahama, Tomohiro Nishino, Kimitoshi Yamazaki, Kei Okada, Masayuki Inaba: Attention Region Detection and Tracking for Observing a Person Manipulating Day-to-day Objects, International Journal of Mechatronics and Automation, Vol.3, No.1, pp.58--67, 2013.
- Yuto Nakanishi, Shigeki Ohta, Takuma Shirai, Yuki Asano, Toyotaka Kozuki, Yuriko Kakehashi, Hironori Mizoguchi, Tomoko Kurotobi, Yotaro Motegi, Kazuhiro Sasabuchi, Junichi Urata, Kei Okadaand Ikuo Mizuuchi, Masayuki Inaba: Design Approach of Biologically-Inspired Musculoskeletal Humanoids, International Journal of Advanced Robotic Systems, Vol.10, pp.1-18, 2013.
- Iori KUMAGAI, Kazuya KOBAYASHI, Shunnichi NOZAWA, Youhei KAKIUCHI, Tomoaki YOSHIKAI, Kei OKADA, Masayuki INABA: Achivement of a response to contact states during object passing action of the life sized humanoid with a multi-axis soft tactile sensor cover, Journal of Robotics Society of Japan, Vol.31, No.10, pp.985-991, 2013.
- Kazuya KOBAYASHI, Tomoaki YOSHIKAI, takefumi GOTO, Masayuki INABA: Development of Self-protection Behaviors in Fall Down by a Robot with Distributed Soft Flesh and Joint Shock Resistive Mechanism, Journal of Robotics Society of Japan, Vol.31, No.4, pp.416--423, 2013.
- Masahiko Osada, Hironori Mizoguchi, Yuki Asano, Toyotaka Kozuki, Junichi Urata, Yuto Nakanishi, Kei Okada, Masayuki Inaba: Application of "Planar Muscle" with Soft Skin-Like Outer Function Suitable for Musculoskeletal Humanoid, Journal of Robotics and Mechatronics, Vol.24, No.6, pp.1080-1088, 2012.
- Yuto Nakanishi, Shigeki Ohta, Takuma Shirai, Yuki Asano, Toyotaka Kozuki, Yuriko Kakehashi, Hironori Mizoguchi, Tomoko Kurotobi, Yotaro Motegi, Kazuhiro Sasabuchi, Junichi Urata, Kei Okadaand Ikuo Mizuuchi, Masayuki Inaba: Design Approach of Biologically-Inspired Musculoskeletal Humanoids, International Journal of Advanced Robotic Systems, Vol.10, pp.1-18, 2013.
- Yuto Nakanishi, Yuki Asano, Toyotaka Kozuki, Hironori Mizoguchi, Yotaro Motegi, Masahiko Osada, Takuma Shirai, Junichi Urata, Kei Okada, Masayuki Inaba: Design Concept of Detail Musculoskeletal Humanoid "Kenshiro" -Toward a real human body musculoskeletal simulator-, in Proceedings of the 2012 IEEE-RAS International Conference on Humanoid Robots (Humanoids 2012), pp.1-6, 2012.
- Yoshito Ito, Takuya Nakaoka, Junichi Urata, Yuto Nakanishi, Kei Okada, Masayuki Inaba: Design and Development of a Tendon-driven and Axial-driven Hybrid Humanoid Leg with High-Power Motor Driving System, in Proceedings of the 2012 IEEE-RAS International Conference on Humanoid Robots (Humanoids 2012), pp.475--480, 2012.
- Shunichi Nozawa, Masaki Murooka, Shintaro Noda, Kei Okada,, Masayuki Inaba: Description and Execution of Humanoid's Object Manipulation based on Object-environment-robot Contact States, in Proceedings of The 201 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2608 - 2615, 2013.
