- Kei Okada, Akira Fuyuno, Takeshi Morishita, Takashi Ogura, Yasumoto Ohkubo, Yasuyuki Kino, Masayuki Inaba, Hirochika Inoue : "Device Distributed Approach to Extensible Robot System using Intelligent Device Unit with Super-micro Processor", Journal of Robotics and Mechatronics, Vol. 16, No. 2, pp 208-216, 2004.
- Kei Okada, Takeshi Morishita, Marika Hayashi, Masayuki Inaba, Hirochika Inoue : "Design and Development of Small Stereo Vision Sensor Module for Small Self-Contained Autonomous Robots", Journal of Robotics and Mechatronics, Vol. 17, No. 2, pp , 2005.
- 中井 博之, 岡田 慧, 佐藤 大輔, 堺 大輔, 木野 泰之, 國吉 康夫, 稲葉 雅幸, 井上 博允 : "関節のソフトウェアサーボが可能な第三世代リモートブレインロボットの開発", 第19回ロボット学会学術講演会予稿集, pp 785-786, 2001.
- 岡田 慧, 中井 博之, 佐藤 大輔, 堺 大輔, 木野 泰之, 國吉 康夫, 稲葉 雅幸, 井上 博允 : "ポータブルPCブレインをもつ研究教育用小型卓上ヒューマノイドシステムの開発", 第19回ロボット学会学術講演会予稿集, pp 1261-1262, 2001.
- 冬野 明, 岡田 慧, 稲葉 雅幸, 井上 博允 : "拡張型モータ・センサモジュールを実現するインテリジェントコンタクト端子の設計", 第20回ロボット学会学術講演会予稿集, pp 1M38, 2002.
- 木野 泰之, 岡田 慧, 稲葉 雅幸, 井上 博允 : "物体操作データベースを
用いた視覚主導型ヒューマノイド遠隔操作システム", 第20回ロボット学会
学術講演会予稿集, pp 3C23, 2002.
- 瀬里 彰信, 岡田 慧, 稲葉 雅幸, 井上 博允 : "人間型ロボットの視覚と触覚を用いたはしご昇段行動", 第20回ロボット学会学術講演会予稿集, pp 1H17, 2002.
- 森下 武志, 岡田 慧, 稲葉 雅幸, 井上 博允 : "携帯小型カメラを用いる小型自律行動ロボットのための両眼視覚センサモジュールの開発", 日本機械学会ロボティクス・メカトロニクス講演会'04 講演論文集, pp 2P2-L2-39, 2004.
|

 までお願いします。
までお願いします。

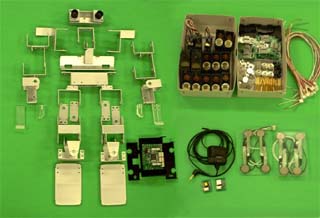


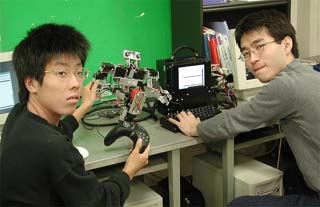
 小型卓上ヒューマノイドの研究環境
小型卓上ヒューマノイドの研究環境
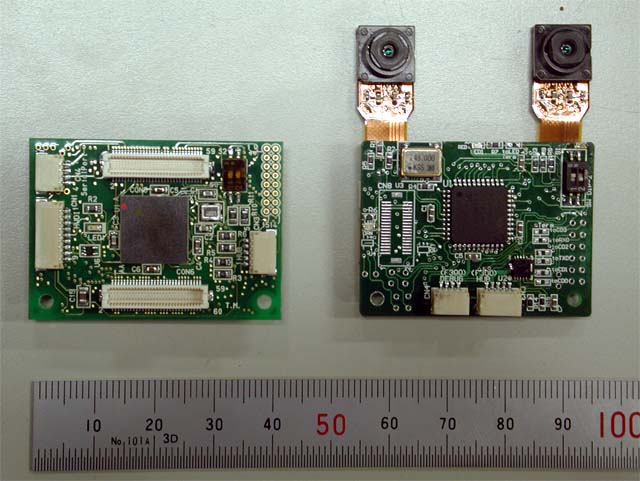
 視覚をもった小型卓上ヒューマノイド
視覚をもった小型卓上ヒューマノイド
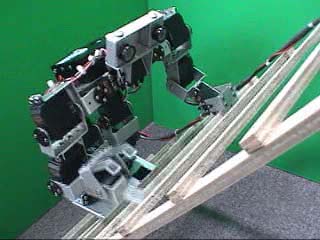
 小型卓上ヒューマノイドの行動実現例
小型卓上ヒューマノイドの行動実現例
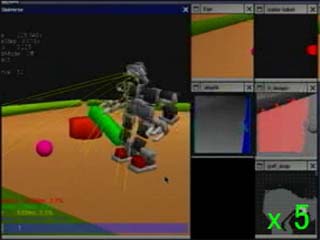
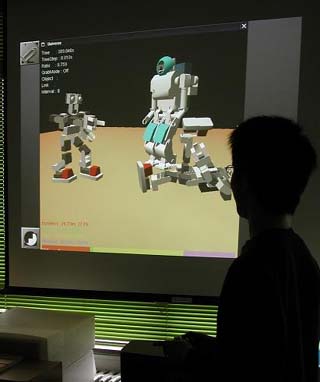
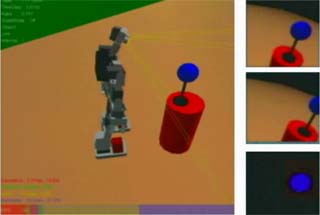 視覚行動シミュレータ
視覚行動シミュレータ