|
 References
References
|
|
- Kei Okada, Akira Fuyuno, Takeshi Morishita, Takashi Ogura, Yasumoto Ohkubo, Yasuyuki Kino, Masayuki Inaba, Hirochika Inoue : "Device Distributed Approach to Extensible Robot System using Intelligent Device Unit with Super-micro Processor", Journal of Robotics and Mechatronics, Vol. 16, No. 2, pp 208-216, 2004.
- Kei Okada, Takeshi Morishita, Marika Hayashi, Masayuki Inaba, Hirochika Inoue : "Design and Development of Small Stereo Vision Sensor Module for Small Self-Contained Autonomous Robots", Journal of Robotics and Mechatronics, Vol. 17, No. 2, pp , 2005.
|

 までお願いします。
までお願いします。

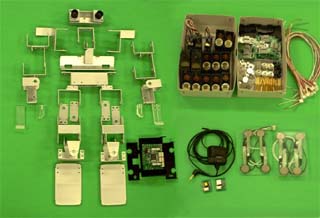


 Assembly Kit for Personal Desktop Humanoid
Assembly Kit for Personal Desktop Humanoid 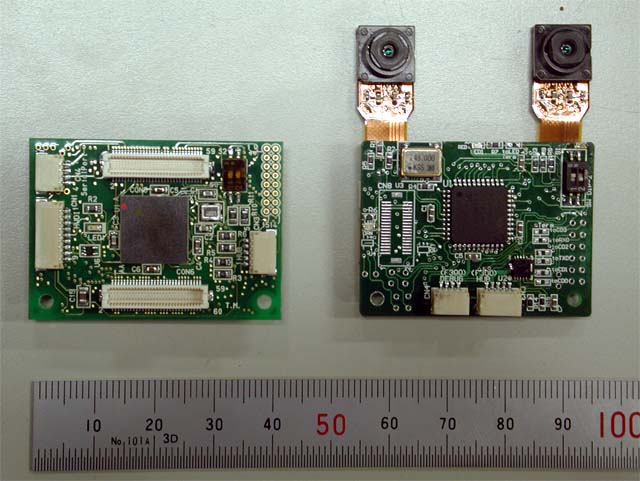
 Small Stereo Vision Module for Personal Desktop Humanoid
Small Stereo Vision Module for Personal Desktop Humanoid 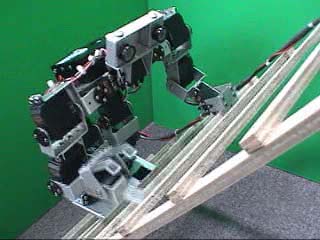
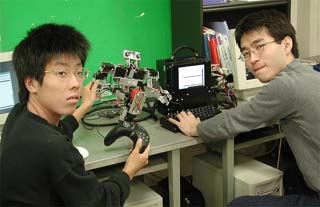
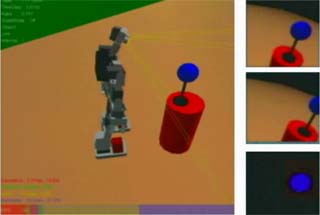
 Behavior Experiments of Personal Desktop Humanoid
Behavior Experiments of Personal Desktop Humanoid 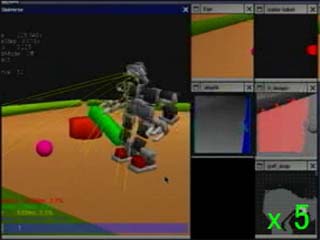
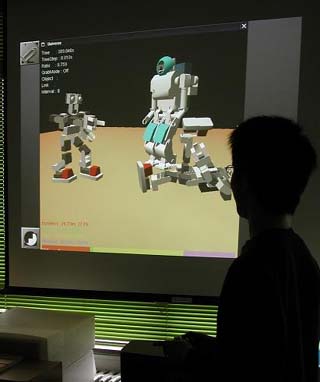
 Humanoid Simulator for Vision based Behavior
Humanoid Simulator for Vision based Behavior