|
|
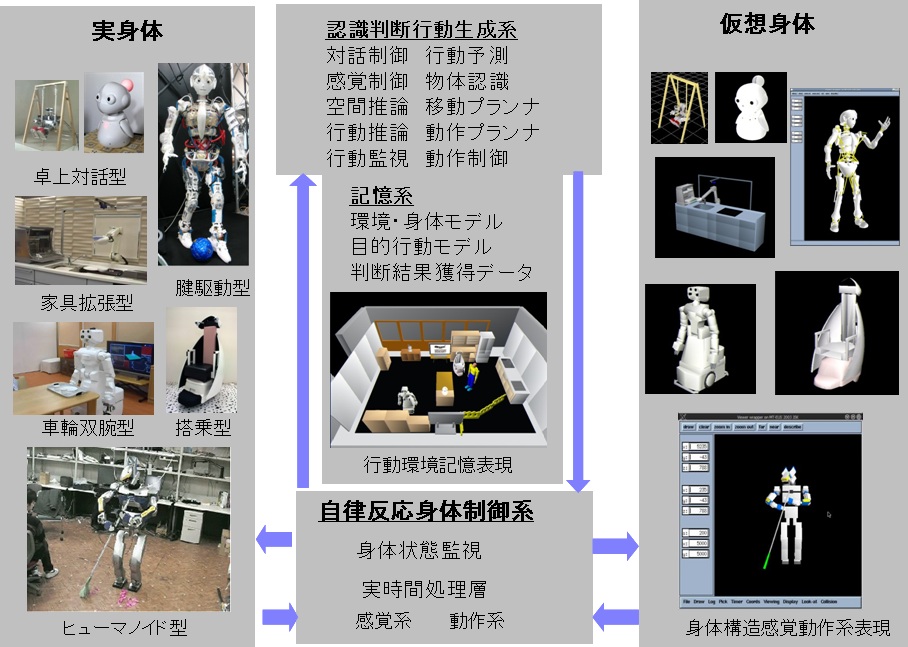
知能ロボット行動実現システム環境
JSKでは様々な形態のロボットにより各種行動実現研究を行っている.特長と
してはそれら異なるロボットに対して共通のソフトウェア基盤を利用できる知
能ロボット行動実現システム環境を利用できるように取り組んでいる.その環
境では, 実ロボットに対して仮想ロボットモデルを持ち,双方に共通に利用
可能な階層ソフトウェアを構成している.
- 参考文献
- M. Inaba, K. Okada, T. Yoshikai, R. Hanai, K. Yamazaki,
Y. Nakanish, H. Yaguchi, N. Hatao, J. Fujimoto, M. Kojima,
S. Tokutsu, K. Yamamoto, Y. Kakiuchi, T. Maki, S. Nozawa, R. Ueda,
I. Mizuuchi:
Enhanced Mother Environment with Humanoid Specialization in IRT Robot Systems,
in Cedric Pradalier and Roland Siegwart and Gerhard Hirzinger (Eds.): Robotics Research: The 14th International Symposium ISRR, pp.379--396, Springer, 2011.
- 稲葉 雅幸, 岡田 慧, 水内 郁夫, 稲邑 哲也:
ヒューマノイドロボットのシステム実現 - ロボットシステム記述言語
EusLispによる実装, コンピュータソフトウェア, Vol.23, No.2, pp.45--61, 2006.
-
M.Inaba, S. Kagami, F. Kanehiro, Y. Hoshino, H. Inoue:
A Platform for Robotics Research Based on the Remote-Brained Robot Approach,
The International Journal of Robotics Research, Vol.19, No.10, pp.933--954, 2000.
-
M. Inaba, S. Kagami, F. Kanehiro, K. Nagasaka:
Mother Operations to Evolve Embodied Robots Based on,
in (Eds.): Artificial Life V, pp.319--326, The MIT Press, 1997.
- M. Inaba:
Remote-Brained Robots,
in Proceedings of Fifteenth International Joint Conference on Artificial Intelligence (IJCAI-97), pp.1593--1606, 1997.
-
Masayuki Inaba:
Remote-Brained Robotics: Interfacing AI with Real World Behaviors,
in Takeo Kanade and Richard Paul (Eds.): Robotics Research, Vol.6, pp.335--344, The International Foundation for Robotcs Research, 1994.
|
|
|

 までお願いします.
までお願いします.