|
|
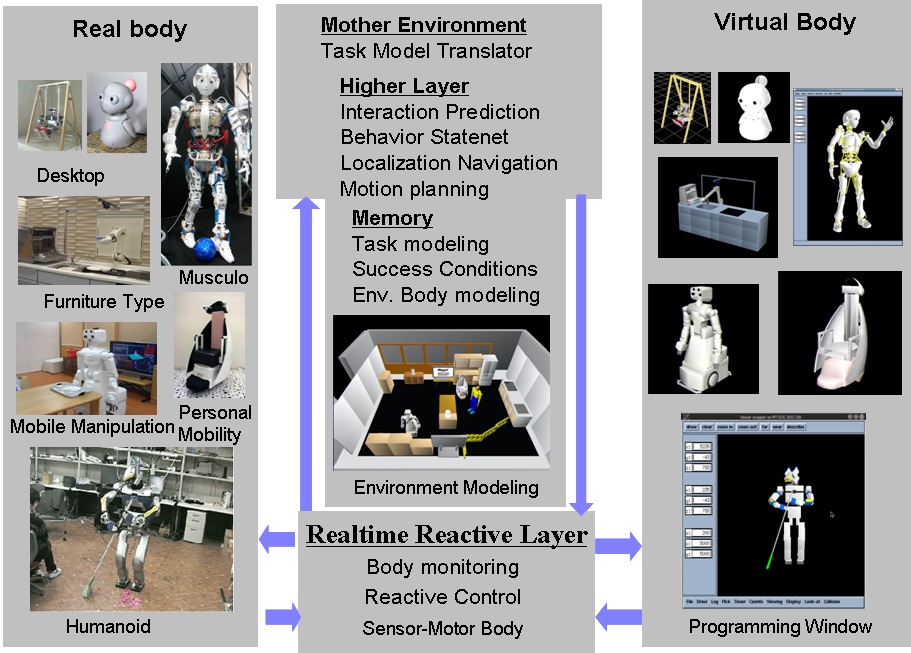
Intelligent Robot System Environment
- M. Inaba, K. Okada, T. Yoshikai, R. Hanai, K. Yamazaki,
Y. Nakanish, H. Yaguchi, N. Hatao, J. Fujimoto, M. Kojima,
S. Tokutsu, K. Yamamoto, Y. Kakiuchi, T. Maki, S. Nozawa, R. Ueda,
I. Mizuuchi:
Enhanced Mother Environment with Humanoid Specialization in IRT Robot Systems,
in Cedric Pradalier and Roland Siegwart and Gerhard Hirzinger (Eds.): Robotics Research: The 14th International Symposium ISRR, pp.379--396, Springer, 2011.
-
Masayuki Inaba, Kei Okada, Ikuo Mizuuchi, Tetsuya Inamura:
System Realization of Humanoid Robot - Implementation in Robot
System Description Language Euslisp,
Computer Software, Vol.23, No.2, pp.45--61, 2006.
-
M.Inaba, S. Kagami, F. Kanehiro, Y. Hoshino, H. Inoue:
A Platform for Robotics Research Based on the Remote-Brained Robot Approach,
The International Journal of Robotics Research, Vol.19, No.10, pp.933--954, 2000.
-
M. Inaba, S. Kagami, F. Kanehiro, K. Nagasaka:
Mother Operations to Evolve Embodied Robots Based on,
in (Eds.): Artificial Life V, pp.319--326, The MIT Press, 1997.
- M. Inaba:
Remote-Brained Robots,
in Proceedings of Fifteenth International Joint Conference on Artificial Intelligence (IJCAI-97), pp.1593--1606, 1997.
-
Masayuki Inaba:
Remote-Brained Robotics: Interfacing AI with Real World Behaviors,
in Takeo Kanade and Richard Paul (Eds.): Robotics Research, Vol.6, pp.335--344, The International Foundation for Robotcs Research, 1994.
|
|
|