|
|
|
|
 研究概要
研究概要
|
|
|
従来,ヒューマノイドロボットの動作生成に関する研究の多くは,
特定の運動の実現を対象としていた.しかし,より素早く知的な行動のためには,
複数の行動要素が同時発生する「ながら」行動が重要である.
そのためには,複数の目的を同時に満たす全身の動作を生成しなければならない.
一方,ヒューマノイドロボットの全身の自由度を制御するインタフェースに関しては,
手で作業を行う場合,脚で移動する場合という具合に,
状況に応じて別々の部位を操縦するものが多い.
そこで本研究では,歩きながら手先が操縦でき,
且つ,手先位置・姿勢の変位量から自律的に全身の動作の生成・制御を可能とする
「手先主導型全身行動制御システム」の実現法を提案する.
実世界で知的に行動するヒューマノイドロボットを実現するためには,
視覚に基づく環境認識と,その結果に基づいた行動計画の機能が重要に
なってくる.床の障害物をよけながらゴールに到達するまでの
ヒューマノイドロボットの歩容を計画するためには,
視覚により地形情報から歩行可能領域を検出し,その後に
幾何学的・機構学的・動力学的制約を満たした軌道を
計画しなければならない.
本研究室では,そのための視覚による環境認識技術,
探索による行動計画技術について研究を行っている.
|
|
|
|
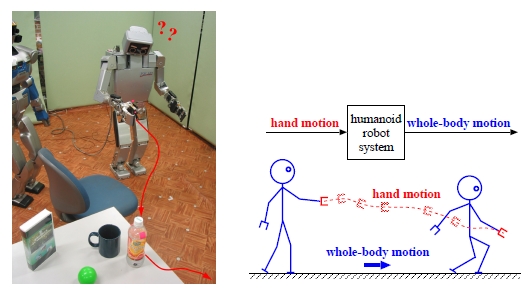
手先主導型全身行動制御システム
|
|
|
ムービー
|
|
- 歩きながら物を取る. [mpg]
- 手先の力を見て,その方向に歩行する.[mpg]
|
|
|
参考文献
|
|
- 福本 康隆, 西脇 光一, 稲葉 雅幸, 井上 博允. "ヒューマノイドロボットの歩行中におけるリーチング戦略".
第21回日本ロボット学会学術講演会講演論文集,
pp.2A17, 2003. [pdf]
- Koichi Nishiwaki, Yasutaka Fukumoto, Satoshi Kagami, Masayuki Inaba, Hirochika Inoue.
"Handposition Oriented Humanoid Walking Motion Control System". Proceedings of The 9th International Symposium on Experimental Robotics, pp.ID162, 2004.
[pdf]
|

 までお願いします。
までお願いします。