|
|
|
|
 Research summary:
Research summary:
|
|
|
Until now, humanoid robot movement creation has been mostly about creating specific motions. However, in order to create quick, intelligent behaviors, it is essential to have several elements operate simultaneously. To achieve this, we need a full-body robot that can fulfill multiple goals simultaneously.
On the other hand, often separate parts of a robot have to interact
simultaneously - for example, when a robot's arm has to adjust for the
hand performing a task. For this, we need an interface that can fully
manage a robot's entire body's degrees of freedom.
At our laboratory, we conduct research on having the robot able to use
its hand while walking, specifically, being able to automatically
adjust the position of his hand as its body position changes, using
our proposed "Hand-Centered Full-Body Movement Control System". In
order to create a humanoid robot that can intelligently navigate the
real world, environment recognition based on vision and movement
planning functions are essential.
|
|
|
|
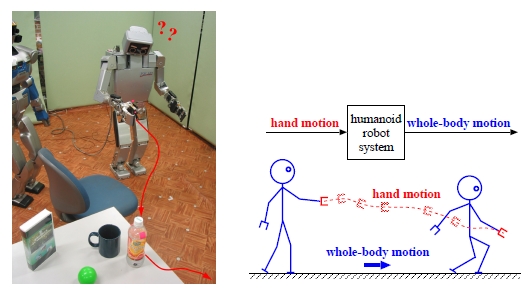
Hand-Centered Full-Body Movement Control System
|
|
|
Movies
|
|
- Picking up an object while walking [mpg]
- Walking in direction of force on its hand [mpg]
|
|
|
References
|
|
- 福本 康隆, 西脇 光一, 稲葉 雅幸, 井上 博允. "ヒューマノイドロボットの歩行中におけるリーチング戦略".
第21回日本ロボット学会学術講演会講演論文集,
pp.2A17, 2003. [pdf]
- Koichi Nishiwaki, Yasutaka Fukumoto, Satoshi Kagami, Masayuki Inaba, Hirochika Inoue.
"Handposition Oriented Humanoid Walking Motion Control System". Proceedings of The 9th International Symposium on Experimental Robotics, pp.ID162, 2004.
[pdf]
|

