|
|
|
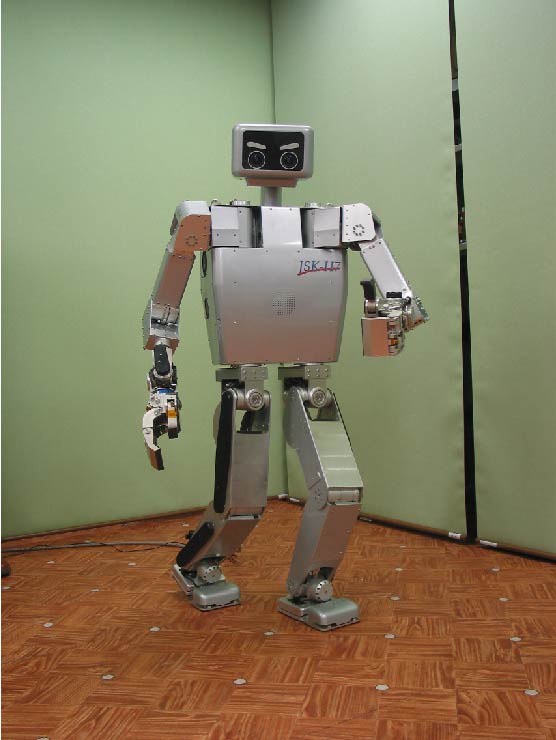
1996年より5年間の日本学術振興会未来開拓学術研究推進プログラムの「マイクロ・ソフトメカニクス統合体としての高度生体機能機械の研究(プロジェクトリーダ 井上博允 現・産業技術総合研究所デジタルヒューマン研究センター研究総括)」プロジェクトにおいて,2001年に完成した感覚行動統合ヒューマノイドロボットである.
本研究室では,等身大感覚行動統合ヒューマノイドプラットフォーム研究(Humanoid Autonomous Robot Platform : HARP)として1991年より等身大ヒューマノイドロボットの開発を行ってきており,H7はその7号機にあたる.高性能デュアルプロセッサ・7自由度アーム・つま先関節・強力なハンドを持ち,オンライン歩行,手を付いての移動,梯子登りなどが可能な感覚行動統合型ヒューマノイドプラットフォームである.
|
|
|
- ヒューマノイドロボットの身体構造
- 感覚行動統合型オンライン動歩行生成
- モーションプランニング
- 手先主導型全身行動制御システム
- 手袋型操作インタフェース
- 狭隘空間通り抜け
- 感覚行動統合型全身行動制御
- 参考文献
- 西脇 光一, 加賀美 聡, 稲葉 雅幸, 井上 博允. "全身型ヒューマノイド「H7」の開発と歩行システムの実装".
平成13年電気学会電子・情報・システム部門大会予稿集,
pp. II-93--96, 2001. [pdf]
- 加賀 美聡,西脇 光一,國吉 康夫,稲葉
雅幸,井上 博允. "RT-Linuxを用いたヒューマノイドロボットH7の知能ソフトウエアシステム構成法".
第19回日本ロボット学会学術講演会講演論文集,
pp. 1105--1106, 2001. [pdf]
-
S. Kagami, K. Nishiwaki, J. J. Kuffner, Y.Kuniyoshi, M. Inaba, H. Inoue. "Design and Implementation of Software Research Platform for Humanoid
Robotics : H7". Proceedings of the 2001 IEEE-RAS International
Conference on Humanoid Robots, pp. 253--258, 2001. [pdf]
-
Satoshi Kagami, Koichi Nishiwaki, James Kuffner, Yasuo Kuniyoshi, Masayuki Inaba, and Hirochika Inoue.
"Online 3D Vision, Motion Planning and Bipedal Locomotion Control Coupling System of Humanoid Robot : H7".
Proceedings of the 2002 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS'02), pp. 2557--2562,
2002. [pdf]
-
Koichi Nishiwaki, Satoshi Kagami, James Kuffner, Masayuki Inaba, and Hirochika Inoue.
"Humanoid `JSK-H7': Research Platform for Autonomous Behavior and Whole Body Motion".
Proceedings of The Third IARP Workshop on Humanoid and Human Friendly Robotics, pp. 2--9,
2002. [pdf]
|
|
|

 までお願いします。
までお願いします。