|
|
|
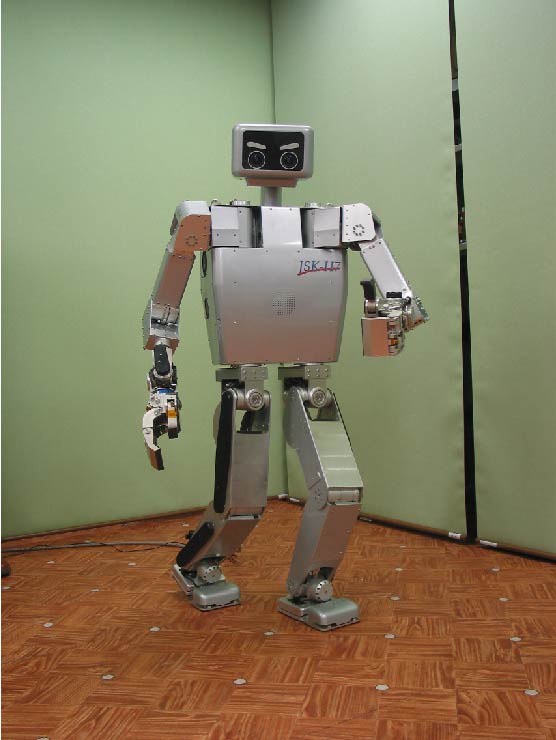
Integrated Sensing and Moving Robot
Platform: H7 |
|
|
For five years since 1996, the Japan Society for the Promotion of
Science Research for the Future Program "Research on Micro and
Soft-mechanics Integration for Bio-mimetic Machines" (Project Leader
Hirochika Inoue, currently Advisor at the Digital Human Research Center, National Institute
of Advanced Industrial Science and Technology) has supported this
project to complete the integrated sensing and moving robot H7.
At our laboratory, we have been conducting life-sized integrated sensing and moving
humanoid platform research (Humanoid Autonomous Robot Platform:
HARP) since 1991, and the H7 is our seventh humanoid robot. It has a
high power dual processor, a seven degree of freedom arm, toe
joints, powerful hands, online walking control, hand-centered
movement control, ladder climbing functions, and many other abilities.
|
|
|
- Humanoid Robot H7's Body Structure
- Online Walking Trajectory Creation
- Motion Planning
- Hand-Centered Full-Body
Movement Control System
- Glove-Controlled Interface
- Transversing Narrow Spaces
- Whole Body Motion and Sensation Integration
- References
- 西脇 光一, 加賀美 聡, 稲葉 雅幸, 井上 博允. "全身型ヒューマノイド「H7」の開発と歩行システムの実装".
平成13年電気学会電子・情報・システム部門大会予稿集,
pp. II-93--96, 2001. [pdf]
- 加賀 美聡,西脇 光一,國吉 康夫,稲葉
雅幸,井上 博允. "RT-Linuxを用いたヒューマノイドロボットH7の知能ソフトウエアシステム構成法".
第19回日本ロボット学会学術講演会講演論文集,
pp. 1105--1106, 2001. [pdf]
-
S. Kagami, K. Nishiwaki, J. J. Kuffner, Y.Kuniyoshi, M. Inaba, H. Inoue. "Design and Implementation of Software Research Platform for Humanoid
Robotics : H7". Proceedings of the 2001 IEEE-RAS International
Conference on Humanoid Robots, pp. 253--258, 2001. [pdf]
-
Satoshi Kagami, Koichi Nishiwaki, James Kuffner, Yasuo Kuniyoshi, Masayuki Inaba, and Hirochika Inoue.
"Online 3D Vision, Motion Planning and Bipedal Locomotion Control Coupling System of Humanoid Robot : H7".
Proceedings of the 2002 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS'02), pp. 2557--2562,
2002. [pdf]
-
Koichi Nishiwaki, Satoshi Kagami, James Kuffner, Masayuki Inaba, and Hirochika Inoue.
"Humanoid `JSK-H7': Research Platform for Autonomous Behavior and Whole Body Motion".
Proceedings of The Third IARP Workshop on Humanoid and Human Friendly Robotics, pp. 2--9,
2002. [pdf]
|
|
|